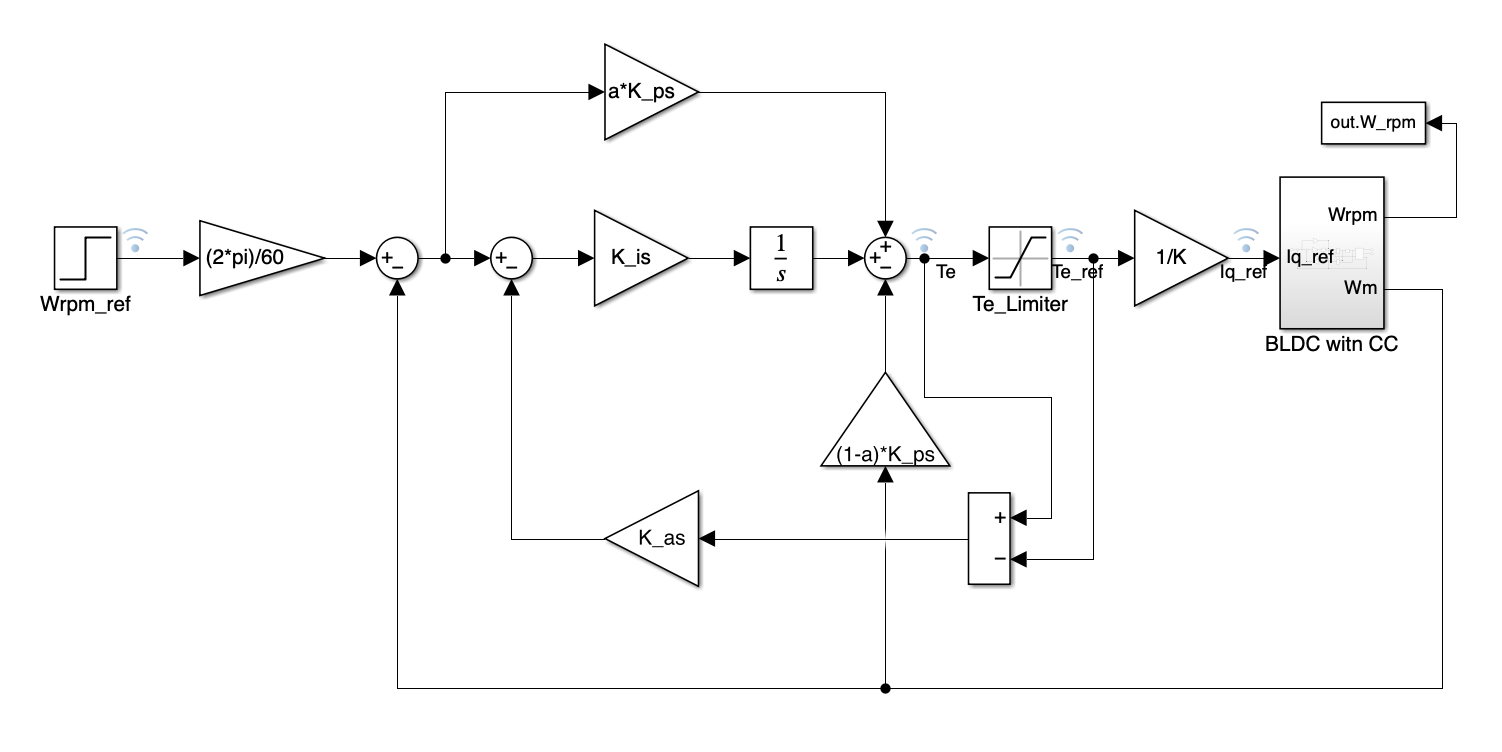
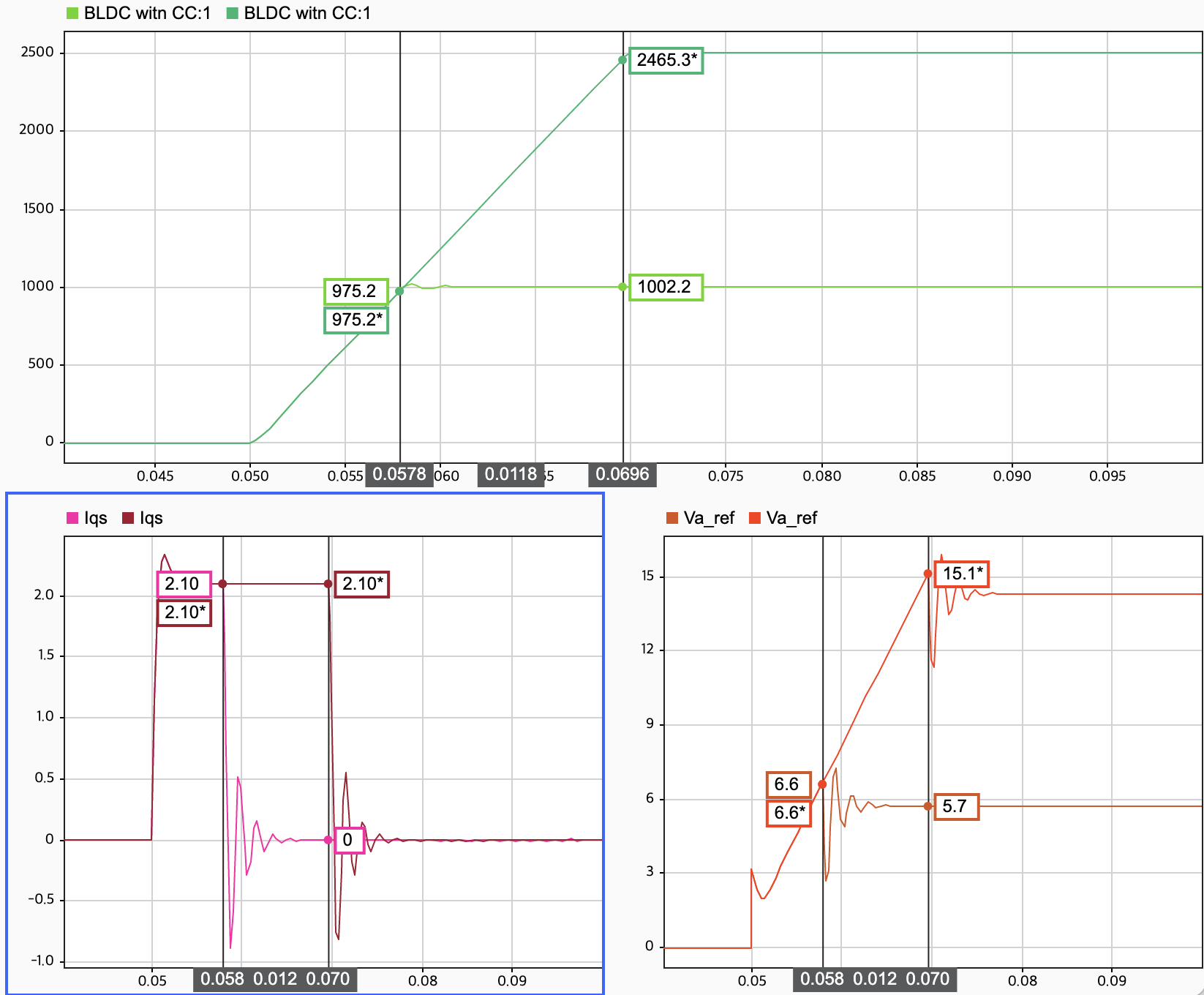
#5 BLDC(PMSM) [PI-IP controller] Gain 변경 실험
1. [a=1] PI controller Kps=0.04, Kis=0.5, Kas=25 [Monitiring] https://youtu.be/5d-6eaFx-IY PI monitoring 기존에 set된 PI controller를 돌렸을 때. motor는 부드럽게 돌아가고, 지령속도에 금방 도착한다. 2. [a=0.5] PI-IP controller Kps=0.04, Kis=0.5, Kas=25 [Monitiring] https://youtu.be/Du3dw3A-lkM PI-IP monitoring [Lab] https://youtu.be/8_bVu_Diom8 PI-IP Lab 실제 motor 회전. 육안상의 차이는 알수없다. Oscilloscope로 확인해야한다. 3. [a=1] PI-IP contro..