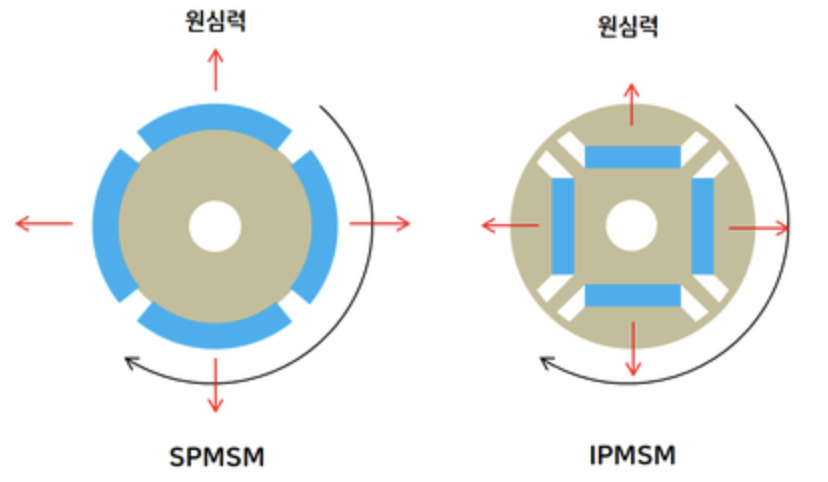
SPMSM vs IPMSM 비교
1. SPMSM(Surface mounted PMSM) SPMSM은 영구자석이 회전자 주변으로 일정한 두께로 배치되어 있어 d축, q축 인덕턴스가 동일하다. SPMSM의 토크는 위 식 처럼 마그네틱 토크만 고려하면 된다. SPMSM은 설계시, 원호 형태의 자석이 필요하고, 표면에 부착하기 때문에 원심력에 의해 튕겨져 나갈 수 있어 어려움이 많다 하지만 자기회로가 간단해 비교적 간단한 제어 알고리즘으로 토크/속도 제어를 수행할 수 있다. 2. IPMSM(Interior Permanent Magnet Synchronous Motor) IPMSM은 영구자석이 회전자 주변으로 자석이 균일하지 않아 d축, q축 인덕턴스가 다르다. d축으로 봤을 때는 자석과 air gap이 동시에 존재하지만, q축으로 봤을 때는 ..