1. SPMSM(Surface mounted PMSM)
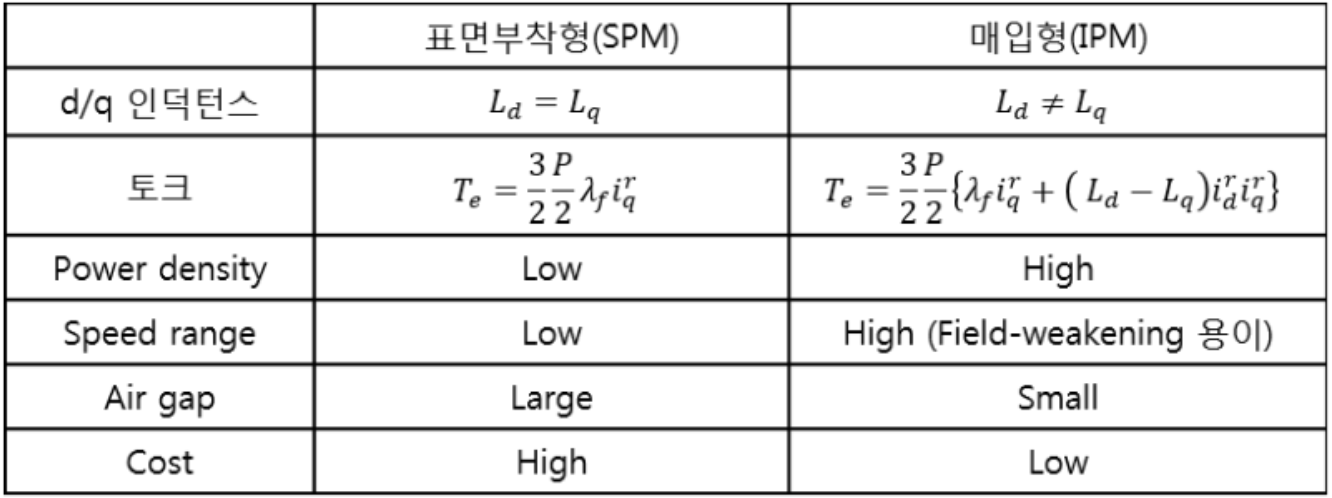
SPMSM은 영구자석이 회전자 주변으로 일정한 두께로 배치되어 있어 d축, q축 인덕턴스가 동일하다.
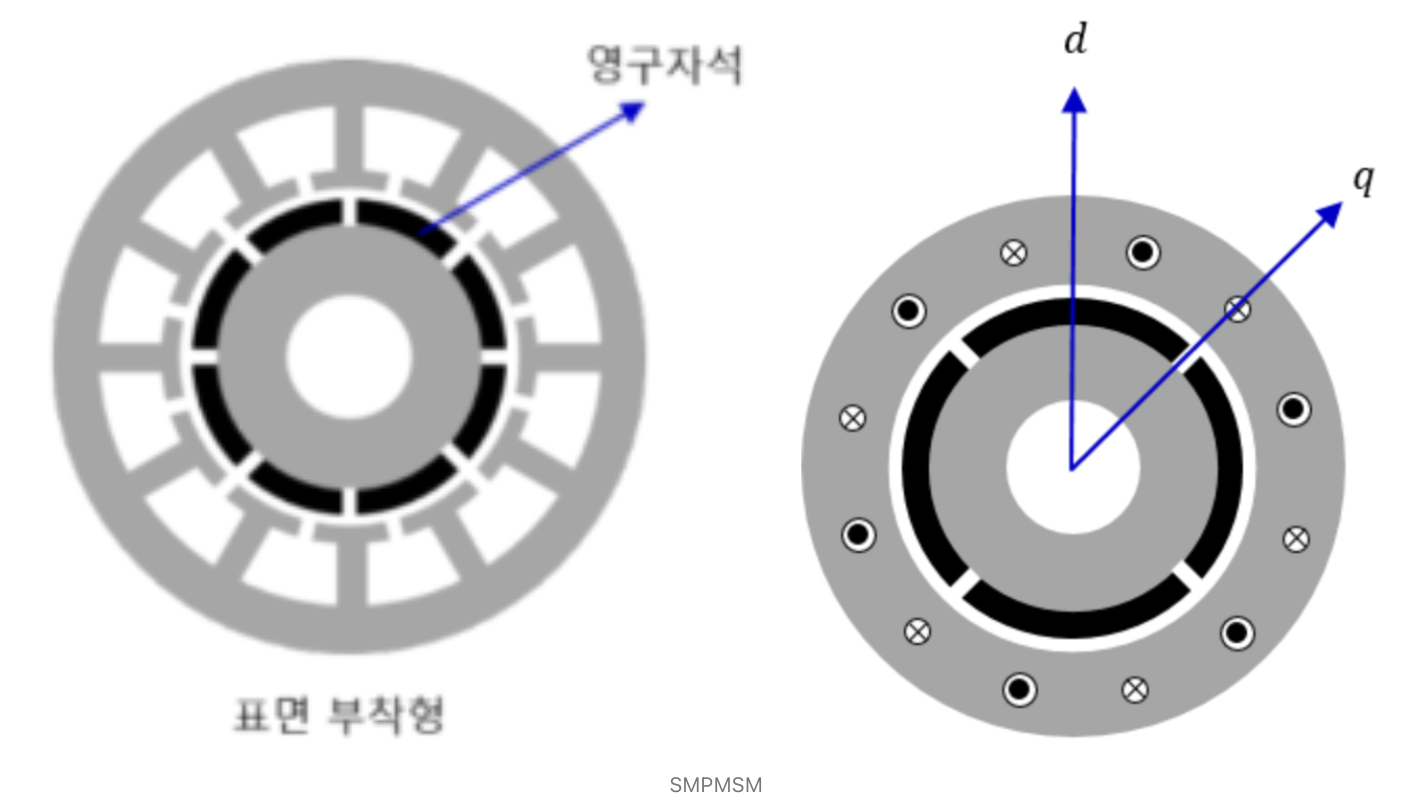
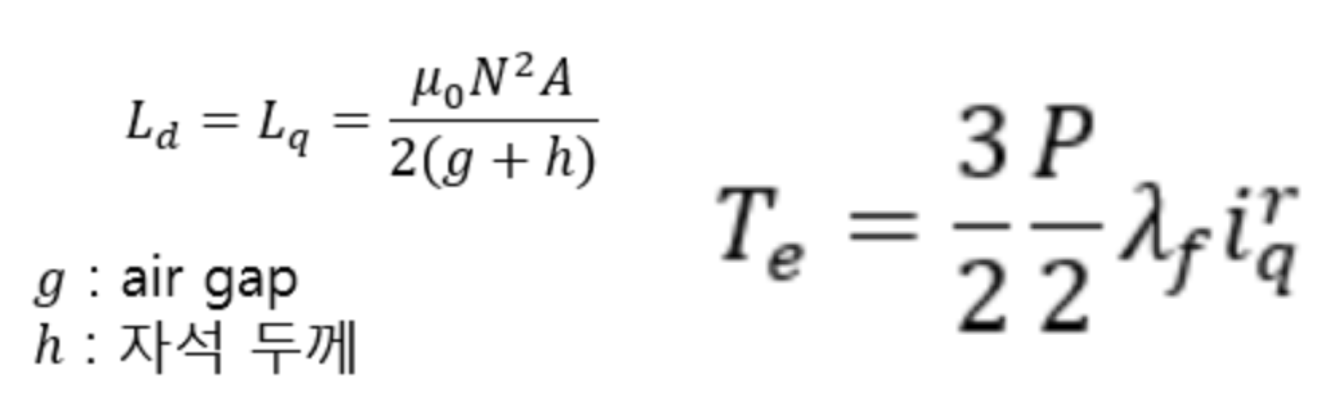
SPMSM의 토크는 위 식 처럼 마그네틱 토크만 고려하면 된다.
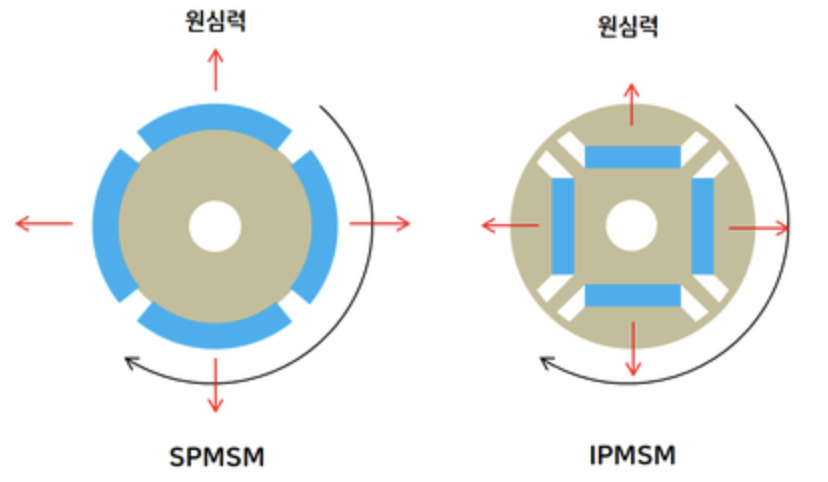
SPMSM은 설계시, 원호 형태의 자석이 필요하고, 표면에 부착하기 때문에 원심력에 의해 튕겨져 나갈 수 있어 어려움이 많다
하지만 자기회로가 간단해 비교적 간단한 제어 알고리즘으로 토크/속도 제어를 수행할 수 있다.
2. IPMSM(Interior Permanent Magnet Synchronous Motor)
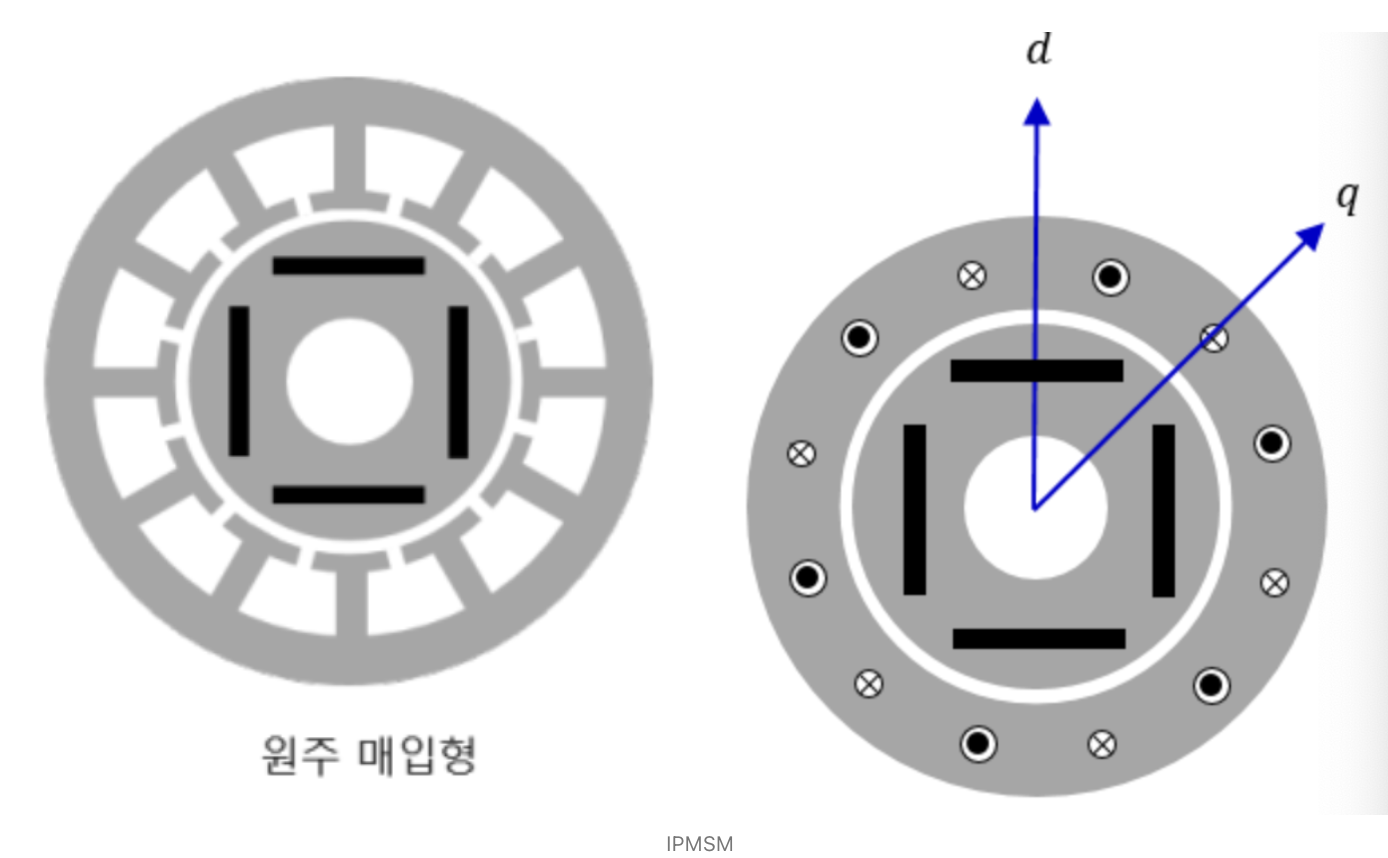
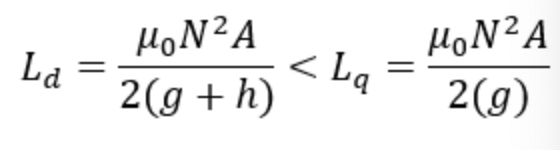
IPMSM은 영구자석이 회전자 주변으로 자석이 균일하지 않아 d축, q축 인덕턴스가 다르다.
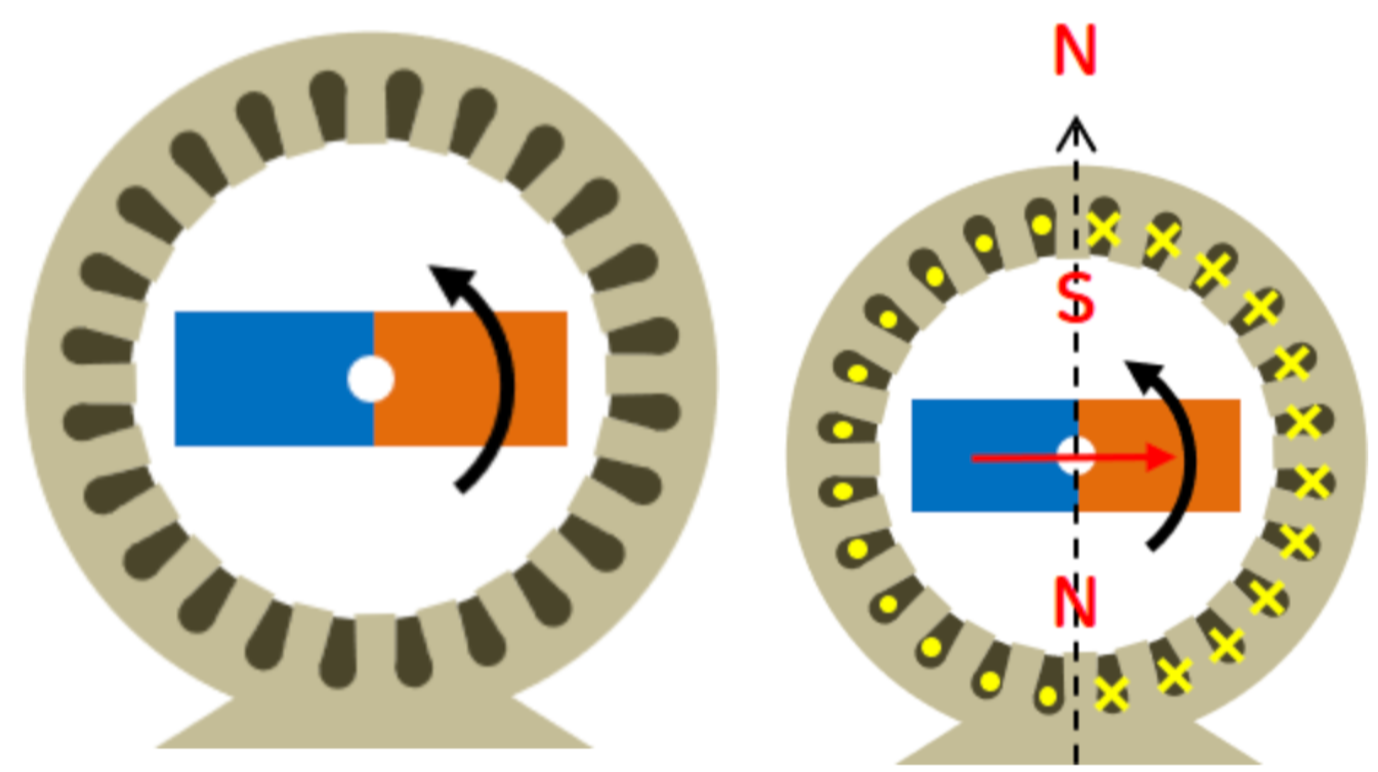
d축으로 봤을 때는 자석과 air gap이 동시에 존재하지만, q축으로 봤을 때는 air gap만 존재하는 것을 확인할 수 있다.
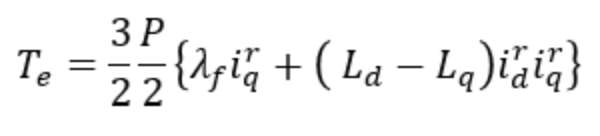
IPMSM은 위 식과 같이 마그네틱 토크와 회전자 위치에 따라 발생하는 릴럭턴스 토크까지 고려해야 한다.
그리고 IPMSM은 릴럭턴스 토크로 인해 SPMSM에 비해 고 토크를 발생시킬 수 있다.
IPMSM은 자석의 형태가 단순하고, 매입해서 부착하기 때문에 내부에 고정되고 공극을 작게 설계할 수 있다.
또한 IPMSM은 릴럭턴스 토크를 사용할 수 있어 약자속 제어를 이용하면 포면 부착형에 비해 더 고속에서 운전한 수 있다.
하지만 릴럭턴스 변화는 고조파로 인한 진동 및 소움이 발생 할 수 있다.
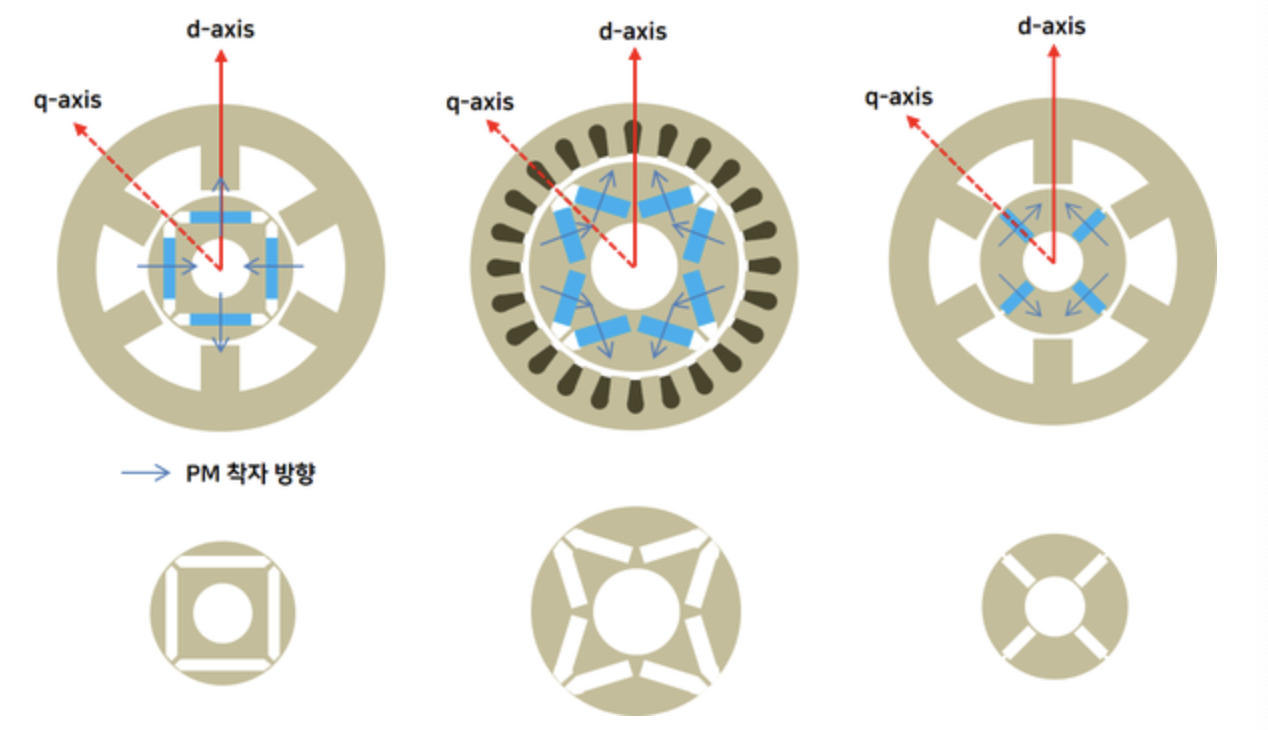
2-(1). D/Q축 분석
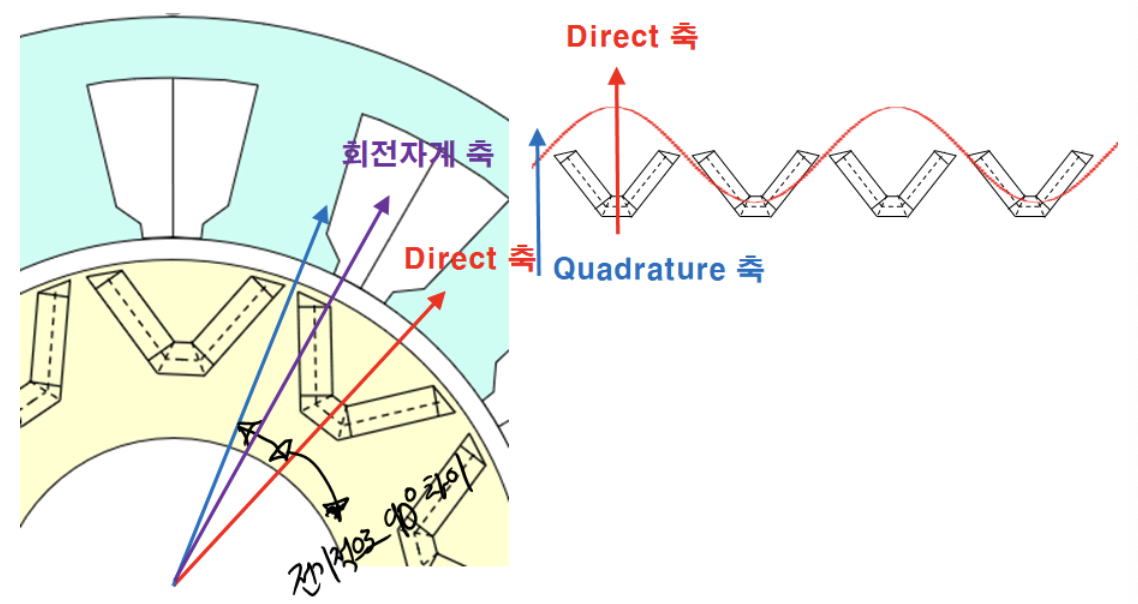
동기전동기에서는 회전자를 기준으로 d축과 q축이라는 것이 있다.
D축은 Direct의 약자로 자속이 집중되는 축이고, Q축은 Quadrature의 약자이다.
Quadrature는 각도 90도를 의미하고 Direct축에서 90도만큼 반시계방향으로 앞서있다고 의미하기 위해서 Q축이라고 부른다.
매입형 영구자석 동기전동 (IPMSM)에서는 자석 한 극의 한 가운데 축을 D축이라고 하고, 극과 극 사이의 틈을 Q축이라 한다.
왜냐하면 자속이 분포하는 중심점이 Direct축이기 때문이다.
인덕턴스는 어떤 코일이나 전선에 전류를 흘렸을 때, 전류당 발생하는 자속의 양이 얼마나 되는지를 나타내는 물리양이다.
단위는 H 헨리, Wb(자속 단위)/A(전류 단위)이다.
D/Q축의 인덕턴스는 D축 전류에 의해서 발생하는 D축 자속의 양이 '1A(rms 또는 peak, 주로 rms)당 몇 Wb'이냐 를 의미하고 D축 인덕턴스는 Q축 전류에 의해서 발생하는 Q축 자속의 양이 '1A(rms 또는 peak, 주로 rms)당 몇 Wb'이냐 를 의미한다.
D축 자로와 Q축 자로라는 것을 알아야한다.
(자로: 자속이 지나는 길, Magnetic flux path)
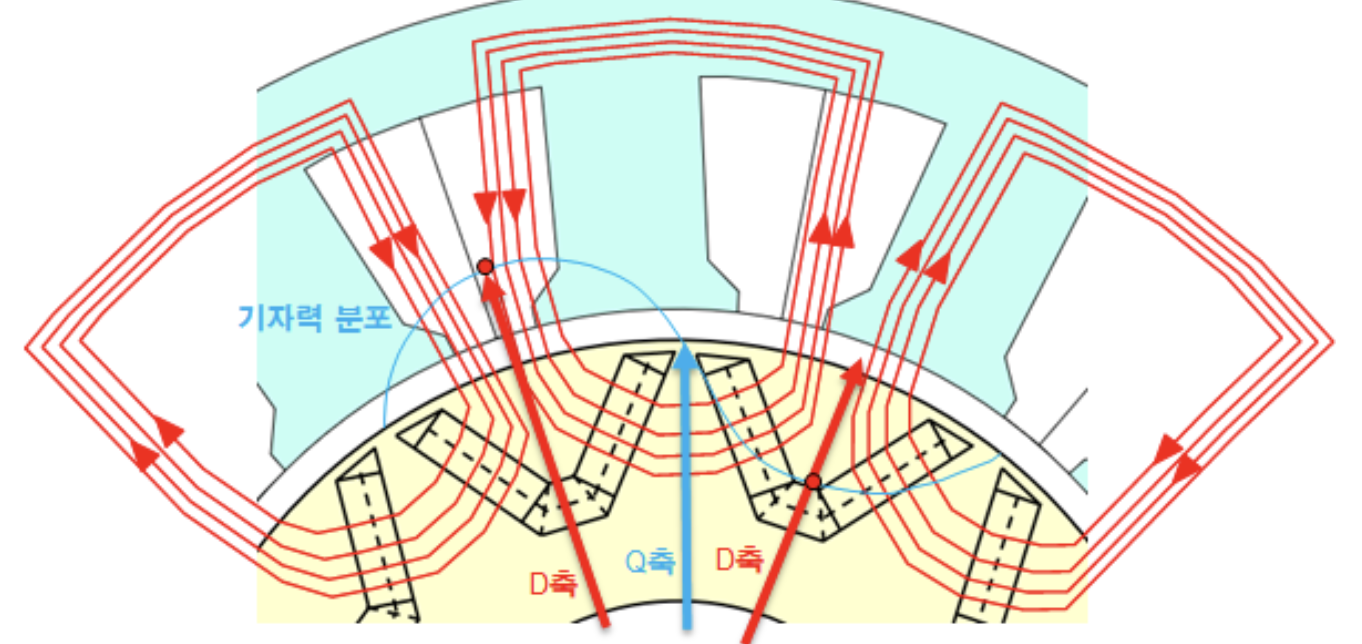
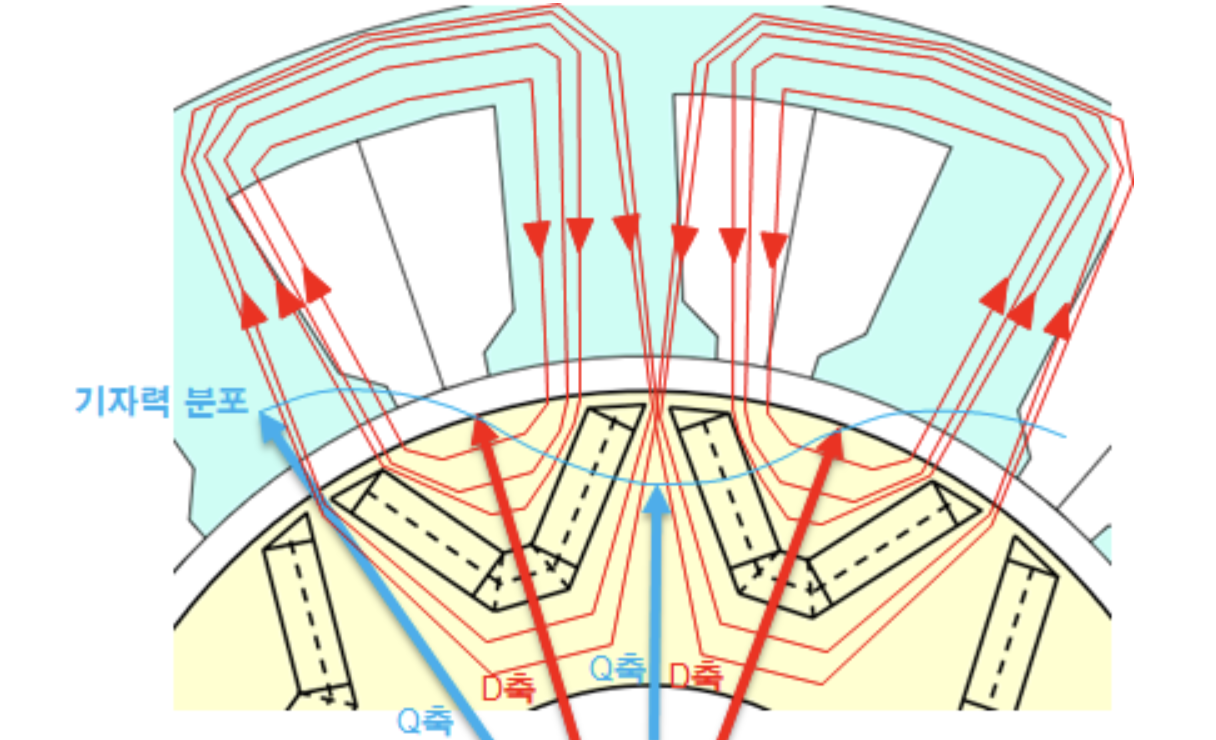
만약 우리가 순수하게 D축 전류만 주었을 때, 자속이 발생해서 흐르는 길은 그림과 같다.
D축 전류만 주게 되면 공극에 분포되는 기자력(MMF)분포가 D축에 집중된다.
그래서 그림처럼 기자력 분포(기본파만 고려해서 Sin파로 그린다)가 D축이 가장 높게 된다.
Q축 전류가 좀 섞이면 D축이 최고점이 아니라 반시계방향으로 약간 앞선 지점이 최고점이 된다.
D축 전류는 회전자의 D축을 향해서 H(자계의 세기: A/m) 필드를 가장 강하게 발생시키고, Q축으로 갈수록 H필드의 세기가 점점 줄어들게 된다.
따라서 회전자의 D축, 그러니까 자석과 같은 자기저항(릴럭턴스)가 매우 큰 곳에 자기장을 발생시킨다.
이러면 발생되는 자속의 양은 적을 수 밖에 없는데, 다층 구조라면 몇개나 되는 공극 자기저항을 뚫고 나가야 하기때문이다.
전류당 발생하는 자속의 양이 적다면, 보통 IPMSM에서 d축 인덕턴스의 값은 크기가 작고 공극이나 자석같은 선형 릴럭턴스가 대부분이어서 일정한 경향을 띈다.
당연히 자속의 양도 기자력 분포에 비례해서 D축에 가까울 수록 자속의 양이 많고 Q축으로 갈수록 자속의 양이 줄어든다.
그렇게 분포된 자속 분포 값을 쇄교자속으로 계산하고 쇄교자속 인덕턴스를 계산하고, 누설자속 인덕턴스를 더하면 D축 인덕턴스가 된다.
Q축 자로는 Q축 전류에 의해서 발생하는 자속이 흐르는 길이다.
Q축 전류에 의해서 발생한 H필드(또는 기자력 MagnetoMotive Force: MMF)는 Q축에서 가장 강하고 D축으로 갈수록 작아진다.
그래서 자속이 자석이 삽입되는 공극을 직접 통과하지 않고 회전자와 고정자 사이의 공극만 통과한 후에는 대부분 철심사이로만 흐르게 된다.
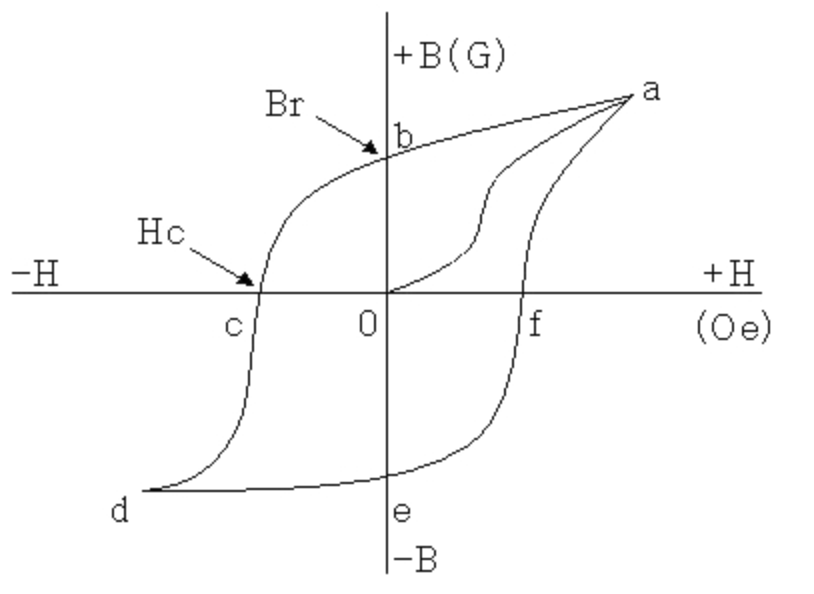
철심의 자기저항은 BH커브에 따라서 비선형적으로 변하니, 계산을 하려면 비선형 솔버를 사용해야 한다.
(매트랩의 경우엔 fsolve 함수를 사용)
3. SPMSM과 IPMSM의 비교 분석
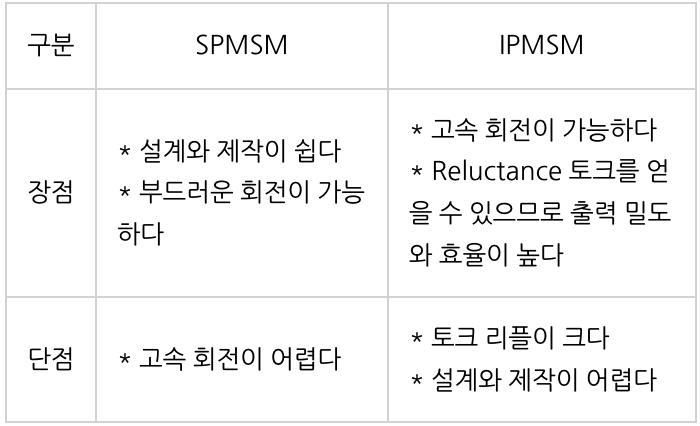
SPMSM(Surface mounted PMSM)은 대부분의 AC 서보모터에서 사용하는 형식인데, 비교적 설계와 제작이 쉽고
부드러운 회전이 가능하지만 고속 회전시 물성이 약한 PM이 원심력에 의하여 비산될 가능성이 높다.
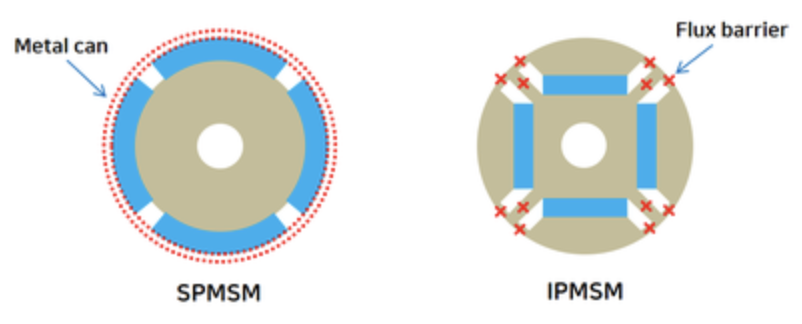
이런 이유로 PM 바깥 쪽에 알루미늄 CAN을 씌우는 경우도 있는데 Airgap이 증가하여 토크가 감소하고 알루미늄 CAN에서 와전류 손실이 발생하여 전반적으로 출력 밀도와 효율이 떨어지게 된다.
이러한 단점을 보완하기 위해 IPMSM이 고안되었다.
PM이 Rotor Core 내부에 매립되어 고속 회전에도 PM의 비산을 막을 수 있고, 부가적으로 릴럭턴스(Reluctance) 토크를 얻을 수 있어서 출력 밀도와 효율이 높다.
그러나 IPMSM은 설계가 다소 복잡하고, 코깅(cogging) 토크가 높은 편이라서 토크의 리플이 비교적 크다는 단점이 있다.
특히, 전자기적으로 좋은 특성을 얻기 위해 Flux Barrier를 최대한 얇게 설계해야 하지만 고속 회전시 이 부분이 구조적으로 원심력을 견야 하므로 적당한 두께를 확보해야만 한다. 그렇기 때문에 설계와 제작이 쉽지 않다.
하지만 Reluctance 토크를 이용함으로써 높은 효율을 얻을 수 있다는 것이 아주 큰 장점이기 때문에 전기차, 하이브리드차, 플러그인하이브리드차 등의 xEV 구동모터로 많이 사용되고 있다.
3-(1). 역기전력과 입력전류
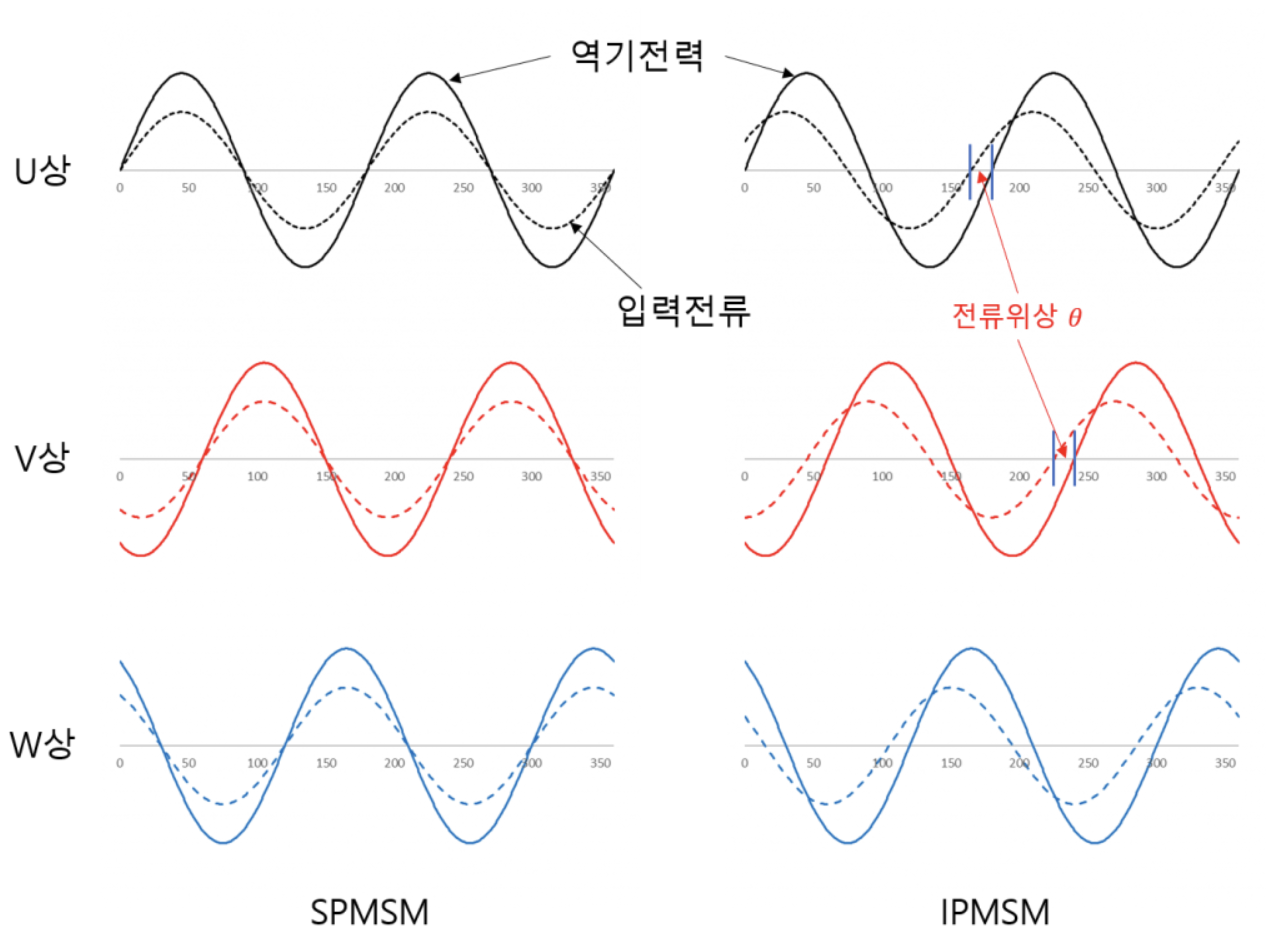
또한 역기전력과 입력전류의 위상을 맞춰야 하는데, SPMSM은 역기전력과 입력전류의 위상이 동상일때 최대 토크가 발생한다.
그러나 IPMSM은 최대토크를 내기 위해 입력전류의 위상을 지연시킨다.
3-(2). Reluctance Torque
동일한 전류에서 가장 높은 토크를 얻기 위해 회전자계가 PM과 90도가 되도록 (부하각, Load Angle) 고정자(Stator) 권선(Winding)에
전류를 공급해야 한다.
PM이 반시계 방향으로 회전을 시작하면, 그 위치를 계속 검출하면서 회전자계의 속도와 부하각 90도를 유지하도록 3상 전류를 제어해야 한다 .
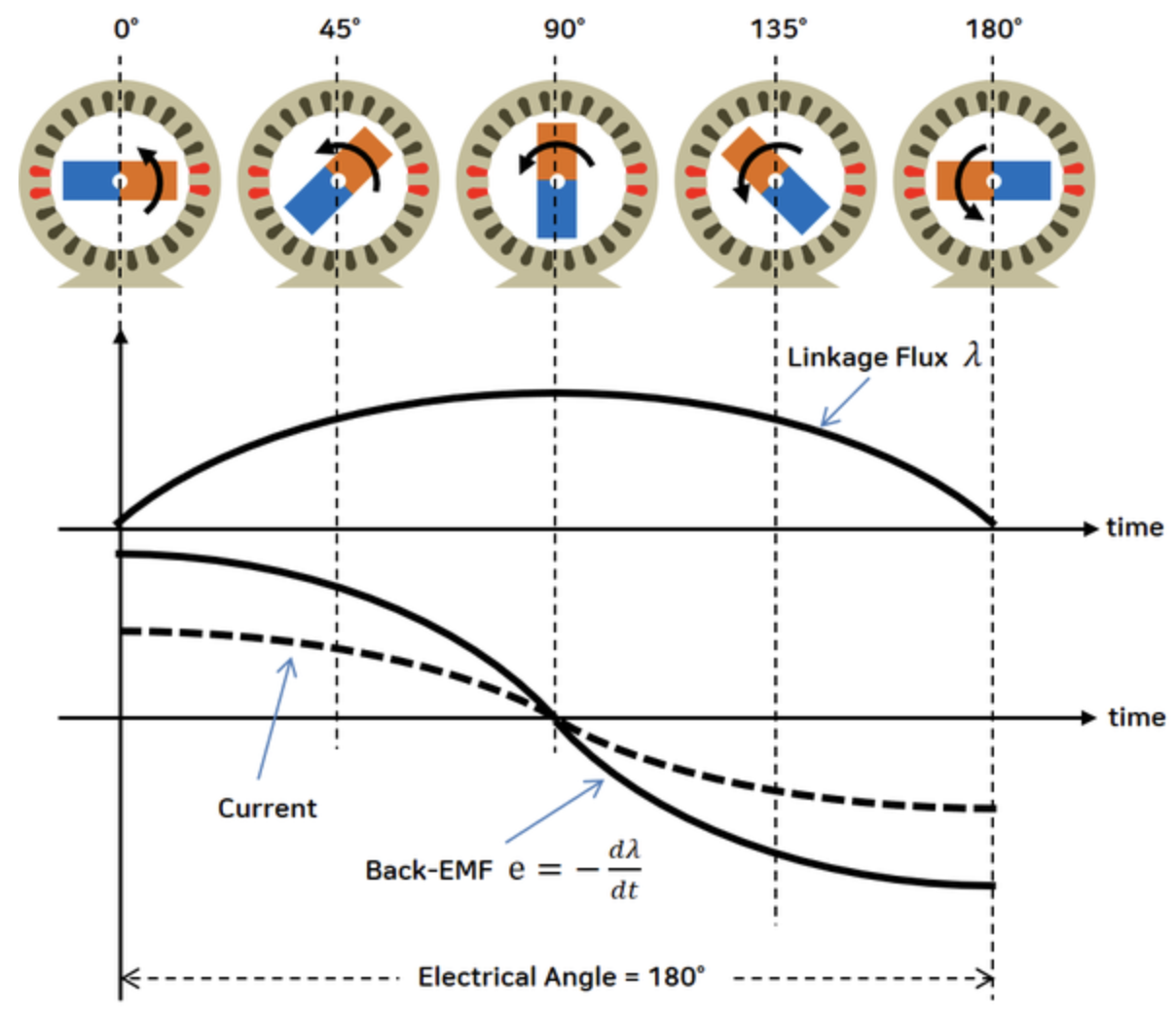
위 그림에서 빨간색으로 표시된 권선을 기준으로 PM이 반시계 방향으로 회전한다고 할 때 권선의 쇄교자속(Linkage Flux) λ 는
90도가 되었을 때 최대가 되고 위치(일정한 속도로 회전한다면 위치와 시간은 종속됨)에 따라 사인 함수의 형태가 된다.
이때 역기전력 e 는 이므로, 코사인 함수가 된다.
단위 전류당 최대 토크를 얻기 위해서는 역기전력과 전류의 위상을 같게 해야 한다.
위 그림의 0도 기준으로 빨간색 권선에 최대 전류를 공급해야 한다.
그렇게 되면 회전자계와 PM의 각도차(부하각)는 90도가 된다.
의도적으로 PM과 회전자계의 부하각을 바꾼다면
그 각도를 전진각(Advanced Angle) 이라고 하고 부하각 90도 = 전진각 0도
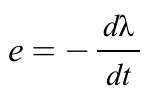
위 그림에서 PM의 주황색은 N극, 파랑색은 S극이라고 할 때, 전진각이 0도이면 토크는 반시계 방향으로 작용한다.
맨 왼쪽부터 순서대로 상태를 살펴보자면,
1. 전진각 = -90도 : PM과 회전자계가 같은 방향으로 정렬되어 매우 안정적인 상태, 그러나 토크는 '0'이다.
2. 전진각 = -45도 : PM이 회전자계와 같은 방향으로 정렬되기 위해 약간의 토크(반시계 방향)가 발생한다.
3. 전진각 = 0도 : PM과 회전자계의 부하각이 90도이고 반시계 방향의 최대 토크(반시계 방향)가 발생한다.
4. 전진각 = +45도 : PM이 회전자계와 같은 방향으로 정렬되기 위해 약간의 토크(반시계 방향)가 발생한다.
5. 전진각 = +90도 : PM과 회전자계가 반대 방향으로 정렬되어 매우 불안정적인 상태, 역시 토크는 '0'이다.
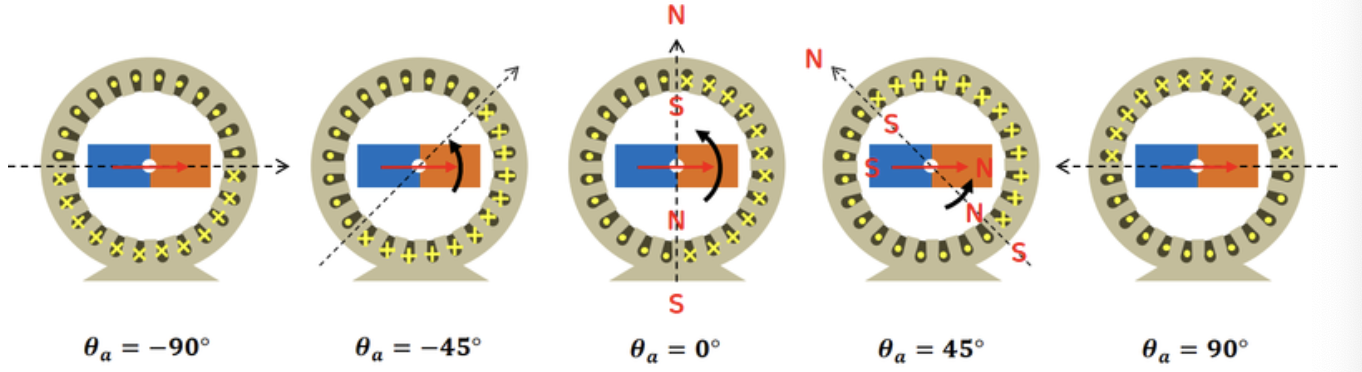
1. 전진각 = -90도 : 자성체와 회전자계가 각도가 90도이고 매우 불안정한 상태, 그러나 토크는 '0'이다.
2. 전진각 = -45도 : 자성체가 회전자계에 정렬되기 위해 시계방향(-)의 최대 토크가 발생한다.
3. 전진각 = 0도 : 자성체와 회전자계가 정렬되어 매우 안정적인 상태, 그러나 토크는 '0'이다.
4. 전진각 = +45도 : 자성체가 회전자계에 정렬되기 위해 반시계방향(+)의 최대 토크가 발생한다.
5. 전진각 = +90도 : 마찬가지로 매우 불안정한 상태이고 토크는 '0'이다.
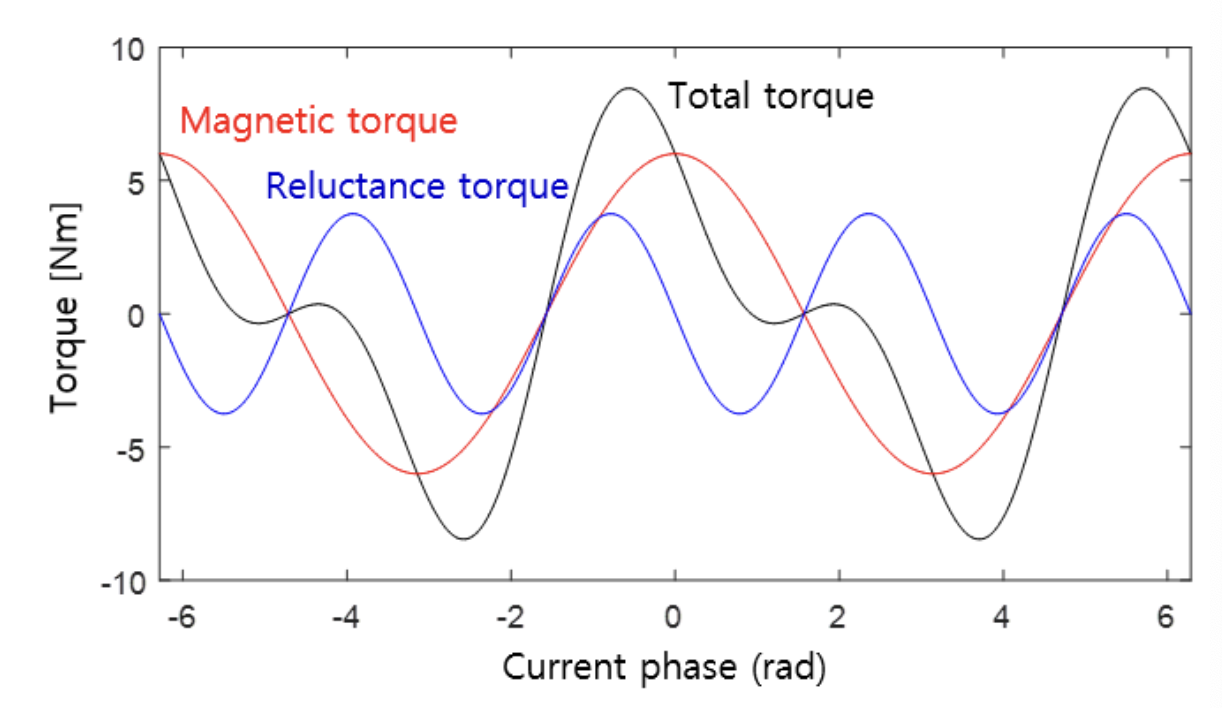
PM에 발생하는 Magnetic 토크와 자성체에 발생하는 Reluctance 토크를 전진각에 따라서 정리해보면 아래 그래프와 같이 표현할 수 있다.
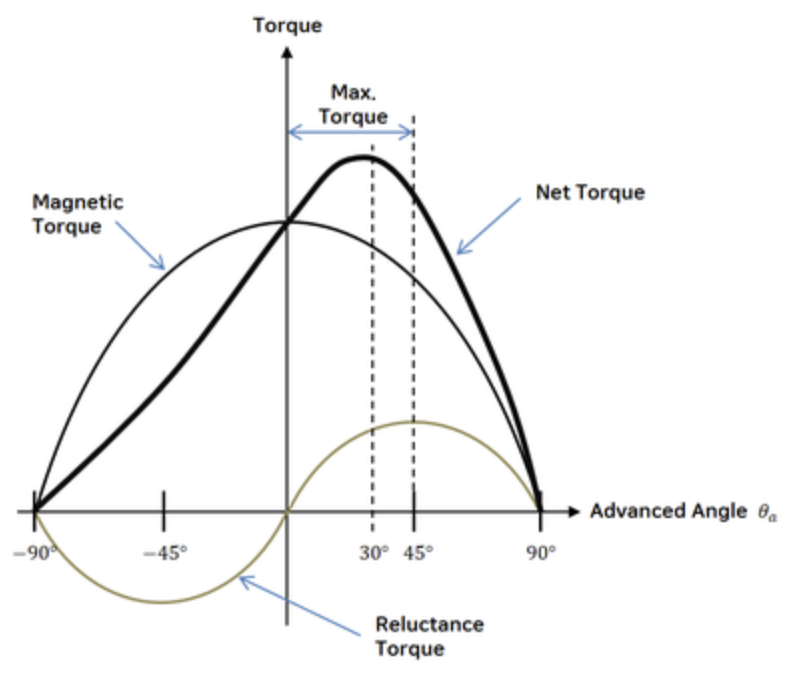
IPMSM의 Rotor에서 PM을 제거하더라도 Rotor의 Iron Core는 돌극형태이기 때문에 Reluctance 토크를 얻을 수 있다.
그래서 IPMSM에서는 Magnetic 토크에 Reluctance 토크가 더해져서 SPMSM보다 더 높은 토크를 얻을 수 있다.
IPMSM은 Reluctance 토크를 얻기 위해 전진각 제어를 하는데, 전진각을 준다는 것은 결국 역기전력과 전류의 위상을
의도적으로 어긋나게 한다는 뜻이다.

그렇기 때문에 Magnetic Power에서 (-) 영역이 나타나게 되므로 전체적으로 출력과 토크가 약간 감소하지만 대신에 Reluctance 토크를 얻을 수 있으니깐 순(Net) 토크는 오히려 증가하는 것이다.
IPMSM에서 전진각은 일반적으로 0도 ~ 45도 이내에서 설정해야 가장 높은 토크를 얻을 수 있다.
조금 어려운 부분이, 전류의 크기에 따라서 Magnetic 토크와 Reluctance 토크가 같이 변화하기 때문에 가장 높은 순 토크를 얻기 위해서는 전류에 따라 전진각을 다르게 제어해야 된다는 것이다.
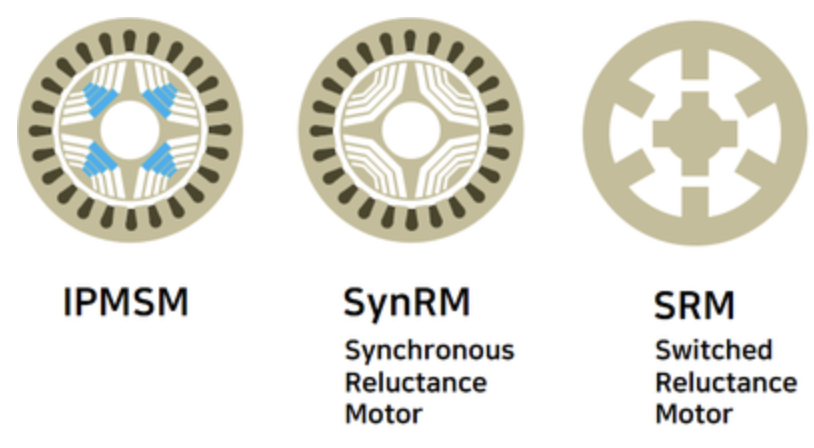
4. 다른 종류의 PMSM motor
IPMSM에서 PM을 제거하면, Reluctance 토크로만 회전하는 SynRM이 되고, 회전자 구조를 좀 더 단순하게 하면서 전류를 간단히 구형파로 구동하는 모터가 SRM 이다.
이어서..
'Study > Motor Control' 카테고리의 다른 글
| 제어기[controller] (0) | 2023.03.08 |
|---|---|
| 역기전력(Back-Elevtro Motive Force) (0) | 2023.02.16 |
| [code analysis] 3상 인버터 보드 M1_inverter.c (0) | 2023.02.13 |
| Motor generator set(M-G set) (0) | 2023.02.13 |
| BLDC 모터와 PMSM 모터의 차이 (0) | 2023.02.13 |