2023.02.23 - [Project/#3 PI-IP controller] - #1 직류전동기 기계 시스템 Simulink 구현 (PI controller)
#1 직류전동기 기계 시스템 Simulink 구현 (PI controller)
2023.02.22 - [Project/#2 Motor Lab] - #1.5 23/2/21 세미나 0. 영구자석 직류 전동기 구동시스템 (전체적인 구성) 위 사진은 영구자석 직류 전동기 구동시스템의 블록도이며 구동 시스템은 크게 직류 전동기
jgewjsrhdms.tistory.com
이전 글에서 BLDC(PMSM) 모터를 PI controller를 사용한 Simulink로 만들어서 속도(RPM)지령을 넣고 PI controller를 사용한 값을 뽑아 내었다.
시간과 파형을 제대로 확인하지 않고 구동만 확인 했던 것이라서 다시 시간을 측정해서 파형 비교해 볼 것이다.
1. Controller



2. Speed, Current, Torque 비교
[Simulation]

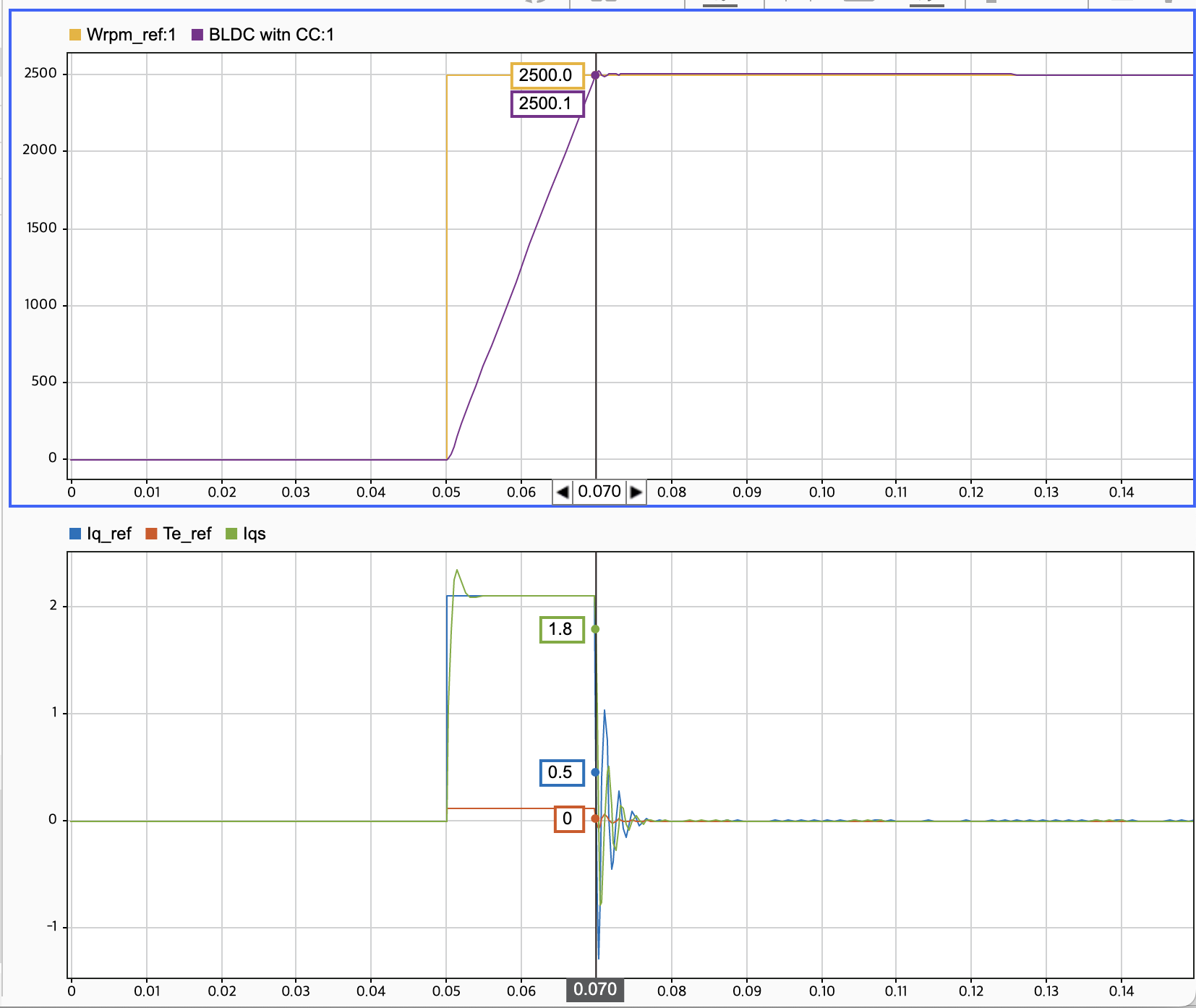
조건 : 0s~0.15s까지 파형 기록, Step 0.05
| 1000rpm | 2500rpm | |
| 지령속도 도달 시간(s) | 0.05806 | 0.06984 |
| Iq_ref(A) | 0.1 | 0.5 |
| Iq(A) | 1.6 | 1.8 |
| Te_ref(N*m) | 0 | 0 |
| Te(N*m) | 0.01 | 0.02 |
[결론]
속도가 높아질수록 지령속도 도달 시간은 증가하며 2500rpm일 때의 Overshoot이 1000rpm일 때보다 시간적으로 짧아보이고 위아래로 요동치는 정도의 크기도 작아보인다.
-> [추가실험결과] 막상 땡겨서 보면 파형은 미세하게 다르긴 한데 거의 같다. scale의 차이임.
예상했던 대로 지령 속도에 거의 도달한 순간에는 토크의 값은 0으로 수렴하고 전류했다.
=> 전류 지령 값도 거의 0으로 수렴하지만 아직 실제 전류는 따라가지 못했기 때문에 Overshoot이 일어난것 같다.
3. Speed, Voltage 비교
[Simulation]
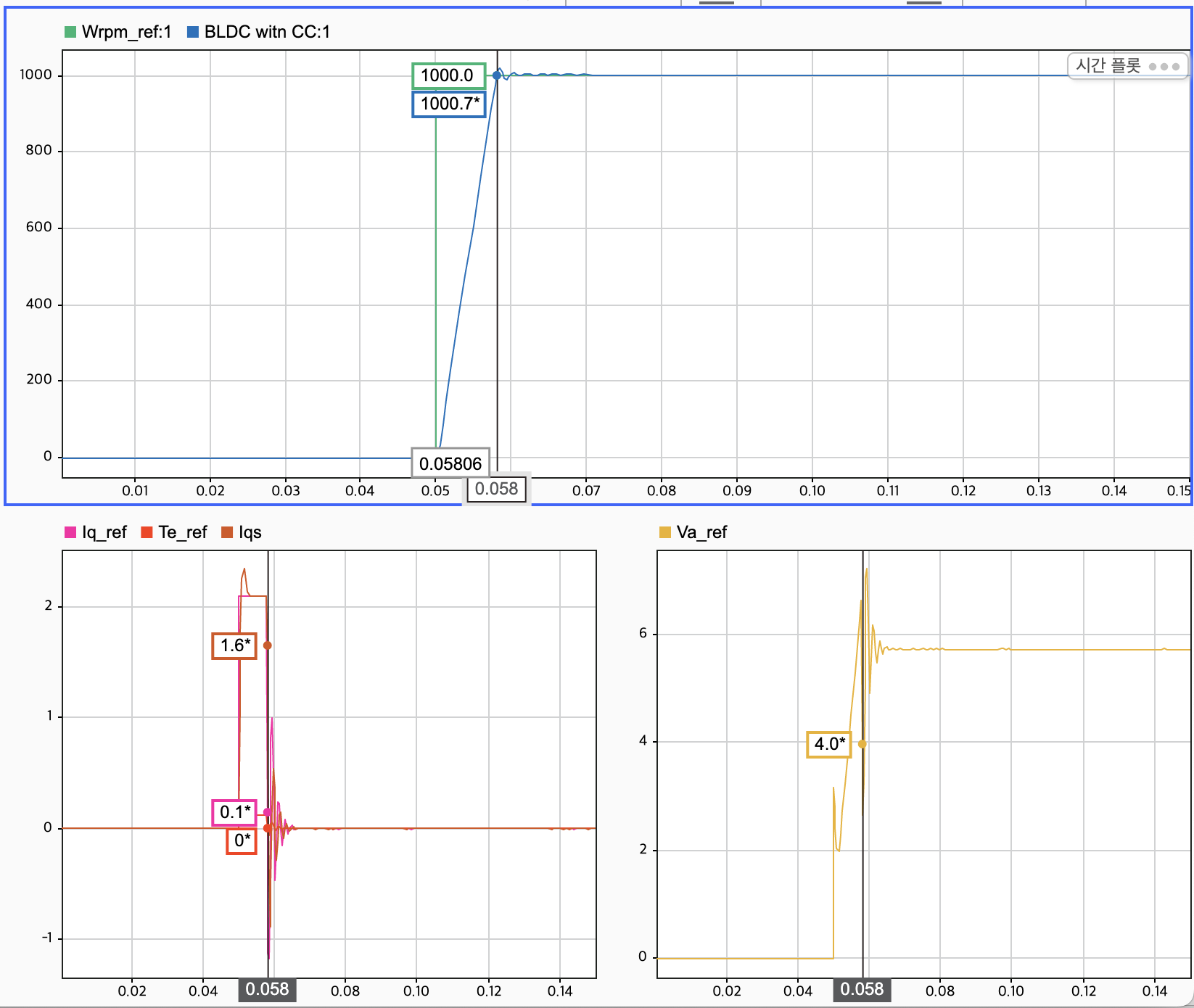
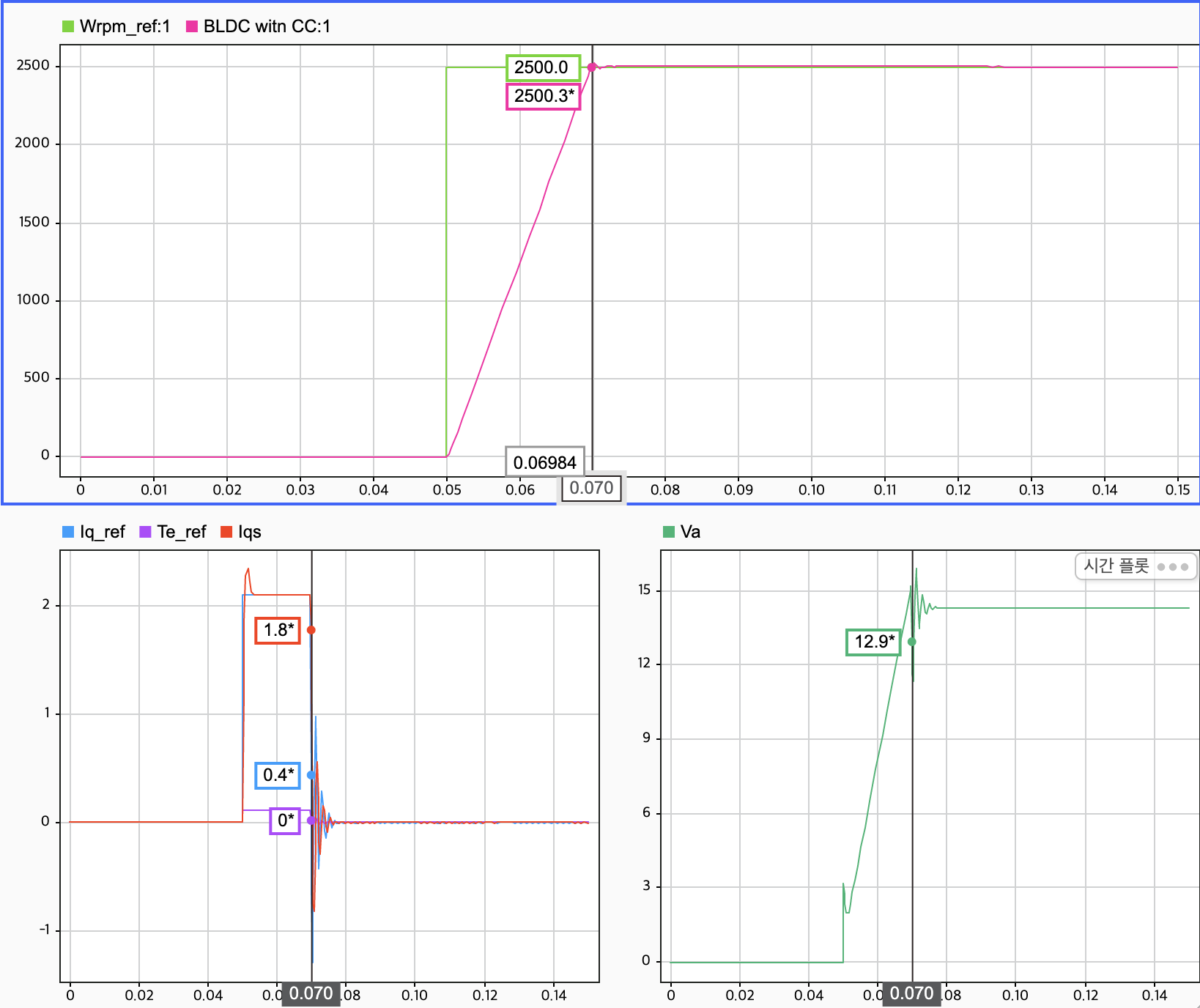
조건 : 0s~0.15s까지 파형 기록, Step 0.05
| 지령속도 관점에서 | 1000rpm | 2500rpm |
| 지령속도 도달 시간(s) | 0.05806 | 0.06984 |
| Iq_ref(A) | 0.1 | 0.4 |
| Iq(A) | 1.6 | 1.8 |
| Te_ref(N*m) | 0 | 0 |
| Te(N*m) | 0.01 | 0.02 |
| Voltage(v) | 4.0 | 12.9 |
[결론]
속도가 높아질 수록 지령 속도에 도달하는 시간은 길어진다.
속도의 크기가 다르기 때문에 1000rpm일 때는 지령속도 도달시 4.0V 전압 값을 가지고 2500rpm일 때는 지령속도 도달시 12.9V의 전압 값을 가진다.
4. Speed, Steady state 비교
[Simulation]
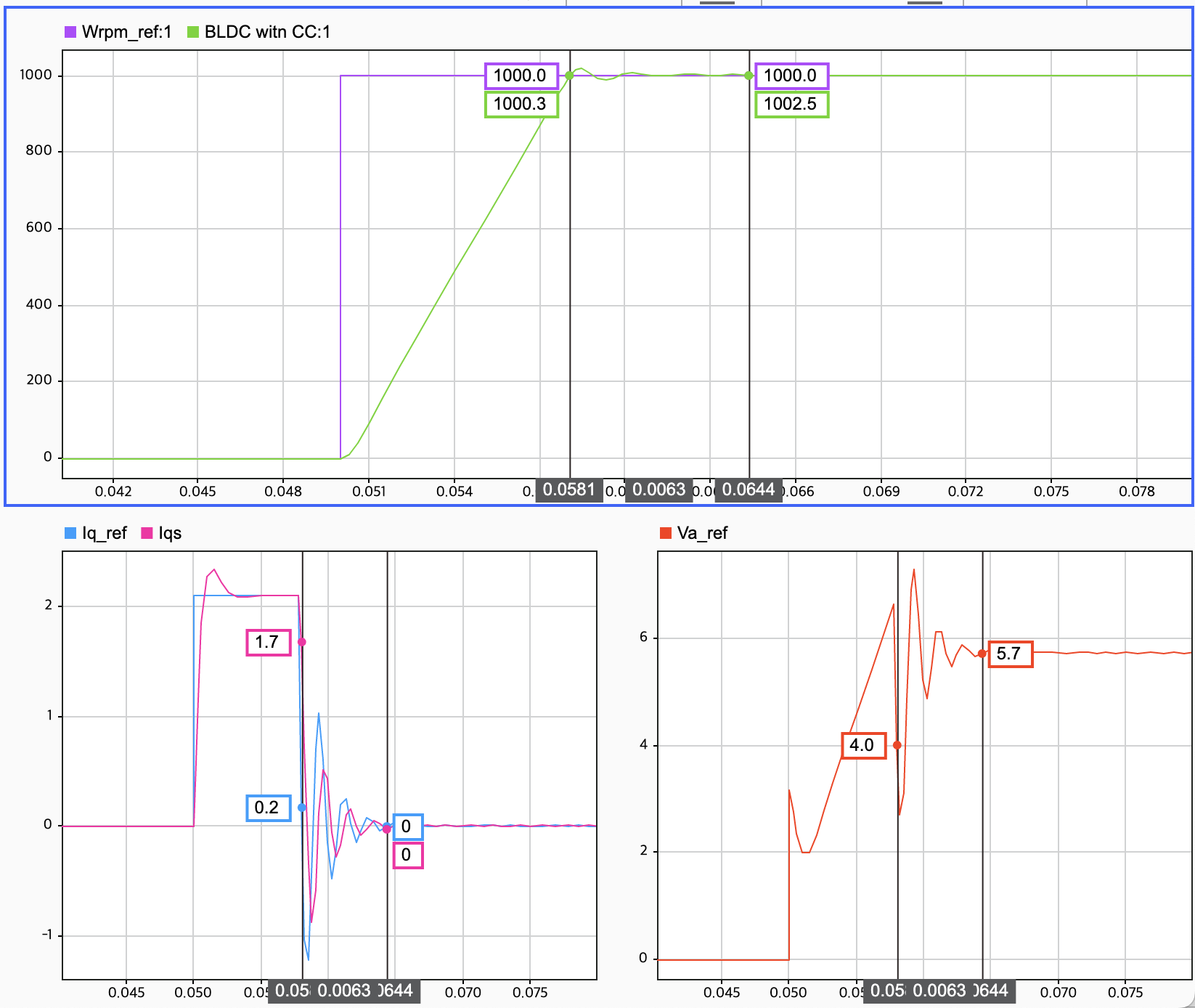
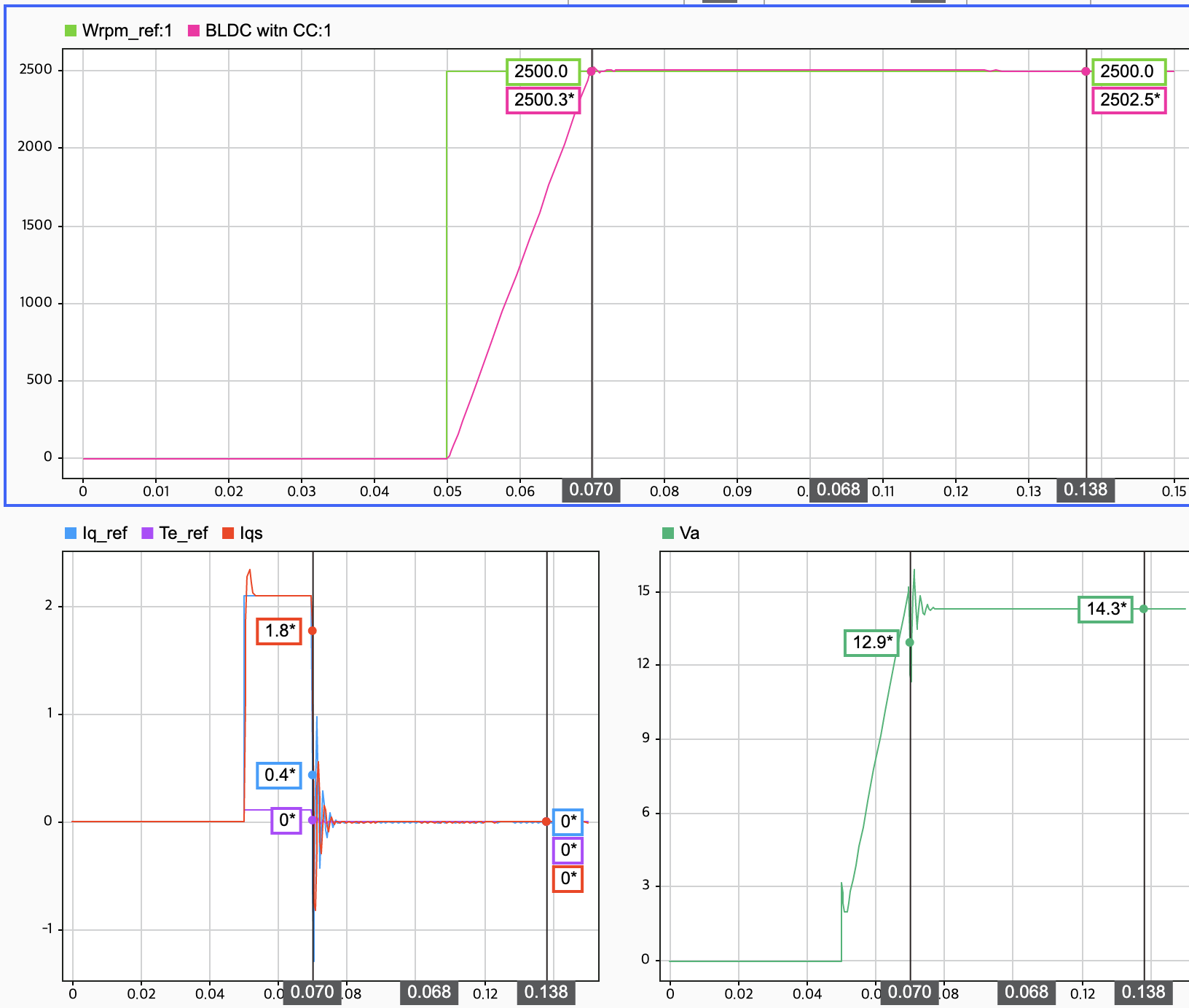
조건 : 0s~0.15s까지 파형 기록, Step 0.05
| 1000rpm | 2500rpm | |
| 지령속도 도달 시간(s) | 0.05806 | 0.06984 |
| 정상상태 도달 시간(s) | 0.0644 | 0.1379 |
| (지령속도에서)Iq_ref(A) | 0.2 | 0.4 |
| (정상상태에서)Iq_ref(A) | 0 | 0 |
| (지령속도에서)Iq(A) | 1.7 | 1.8 |
| (정상상태에서)Iq(A) | 0 | 0 |
| (지령속도에서)Voltage(v) | 4.0 | 12.9 |
| (정상상태에서)Voltage(v) | 5.7 | 14.3 |
[결론]
1000rpm일 때 정상상태까지 도달하기에 0.00634s가 걸리고
2500rpm일 때 정상상태까지 도달하기에 0.06806s가 걸린다.
전압은 1000rpm일 때 1.7V만큼의 차가 나고 2500rpm일 때 1.4V만큼 차이가 난다.
=> 정상상태까지 도달하는데 필요한 전압의 양은 거의 같다.
하지만 도달하기까지의 시간차와 Overshoot의 크기 차이만 난다.
5. 1000rpm, 2500rpm 비교
[Simulation]
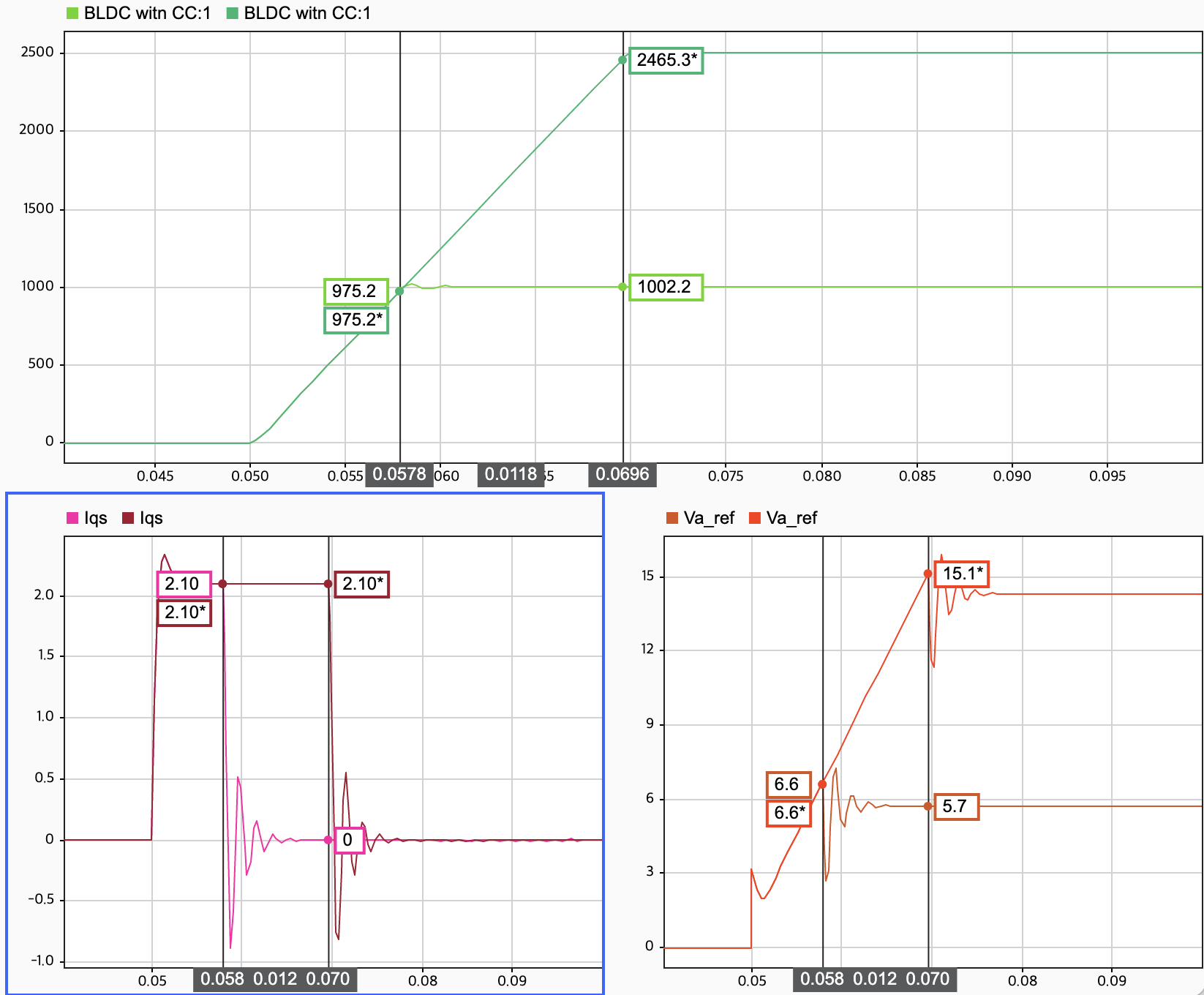
[결론]
두 그래프 파형을 겹쳐 보았을 때 파형이 시간의 차만 있고 파형의 형태는 거의 겹쳐보인다.
=> 파형은 동일하다.
Q. 같은 PI Controller을 사용하였기에 그 안의 gain값들이 상수로 지정되어 있어서 시지연만 있을 뿐 두 파형이 같은 것은 당연한 결과인가?
[교수님say]
p, i 게인이 커서 두 케이스 모두 제어시작하고 순식간에 정격전류에 도달해서 같은 결과가 나온 것 같습니다.
속도제어기 p,i 게인을 낮춰보면 처음 구간 파형이 달라질 거 같다. -> 해보기
속도제어기, 전류제어기 대역폭(Wcc) 을 얼마로 설정했는지? -> gain이 상수값이라 변수로 바꿔서 설계해 봐야 한다.
보통 속도제어기 bandwidth 는 전류제어기에 비해 1/20~1/100 으로 훨씬 낮게 설정한다.
+ 추가실험
가로축 비교 Overshoot양 비교

구간 2460~2540rpm, 960~1040rpm (60정도)
둘의 파형은 미세하게 다르지만 거의 비슷하다.
달라 보였던 것은 Scale의 차이였던 것 같다.(0-2500rpm일 때와 0-100rpm의 비교라서)
[결론] 둘의 파형은 같다.
'Project > #2 Hybrid controller(based on PI-IP)' 카테고리의 다른 글
| #4 BLDC(PMSM) [PI-IP controller] Gain 값 Tuning (0) | 2023.02.25 |
|---|---|
| #3 BLDC(PMSM) [PI-IP controller] Simulation (0) | 2023.02.24 |
| #1 직류전동기 기계 시스템 Simulink 구현 (PI controller) (1) | 2023.02.23 |
| #0 Motor Default Value & Initial Set (0) | 2023.02.23 |
| [LAB #1.5] 23/2/21 세미나 (0) | 2023.02.22 |