1. Controller

a = 1 : PI controller
a = 0 : IP controller
a = 0.5 : PI-IP controller
2-(1). [a=1] PI controller 지령속도 도달
[Simulation]
[조건] 0~0.5s 동안, 1000rpm 일 때
| PI controller [a=1] | PI-IP controller [a=0.5] | IP controller [a=0] | |
| Wrpm[rpm] | 1000.7 | 542.4 | 113.3 |
| Iqs[A] | 1.6 | 0.4 | -0.5 |
| Va[V] | 4.0 | 0 | 3.6 |
[결론]
PI controller은 0.05806s에 이미 지령 속도에 도달하였다.
하지만 PI-IP(0.5)와 IP controller은 PI controller보다 지령속도 도달까지 시간이 꽤 걸린다.
IP제어기는 위아래로 흔들리는 정도가 너무 커서 언제 지령속도엔 도달은 하지만 언제 정상상태가 되었는지는 잘 모르겠다.
=> 그래프상으로만 봤을 때, PI, PI-IP, IP 순으로 지령 도달까지의 시간이 빠르다.
2-(2). [a=1] PI controller 정상상태
[Simulation]
[조건] 0~0.5s 동안, 1000rpm 일 때
| PI controller [a=1] | PI-IP controller [a=0.5] | IP controller [a=0] | |
| Wrpm[rpm] | 1002.4 | 584.8 | 194.8 |
| Iqs[A] | 0 | 1.2 | 0 |
| Va[V] | 5.7 | 3.2 | 0 |
[결론]
PI controller은 0.0644s에 정상상태에 도달하였다.
PI는 이미 정상상태에 도달하였지만 PI-IP, IP는 아직도 지령속도(1000rpm)에 도달하지 못했다.
3-(1). [a=0.5] PI-IP controller 지령속도 도달
[Simulation]
[조건] 0~0.5s 동안, 1000rpm 일 때
| PI controller [a=1] | PI-IP controller [a=0.5] | IP controller [a=0] | |
| Wrpm[rpm] | 1000.0 | 998.2 | 1013.7 |
| Iqs[A] | 0 | 0 | 1.8 |
| Va[V] | 5.7 | 5.7 | 5.9 |
[결론]
PI-IP controller는 0.4993s에 지령속도에 거의 도달하였다. 0.5s가 넘어야 완전히 도달한다고 할 수 있다.
PI는 이미 지령속도에 도달한지 오래 되었고, IP는 도달은 했었지만 그 값이 일정하게 유지되었다고 할 수 있을지 모르겠다.
3-(2). a값 변화에 따른 PI-IP controller 변화
[Simulation]
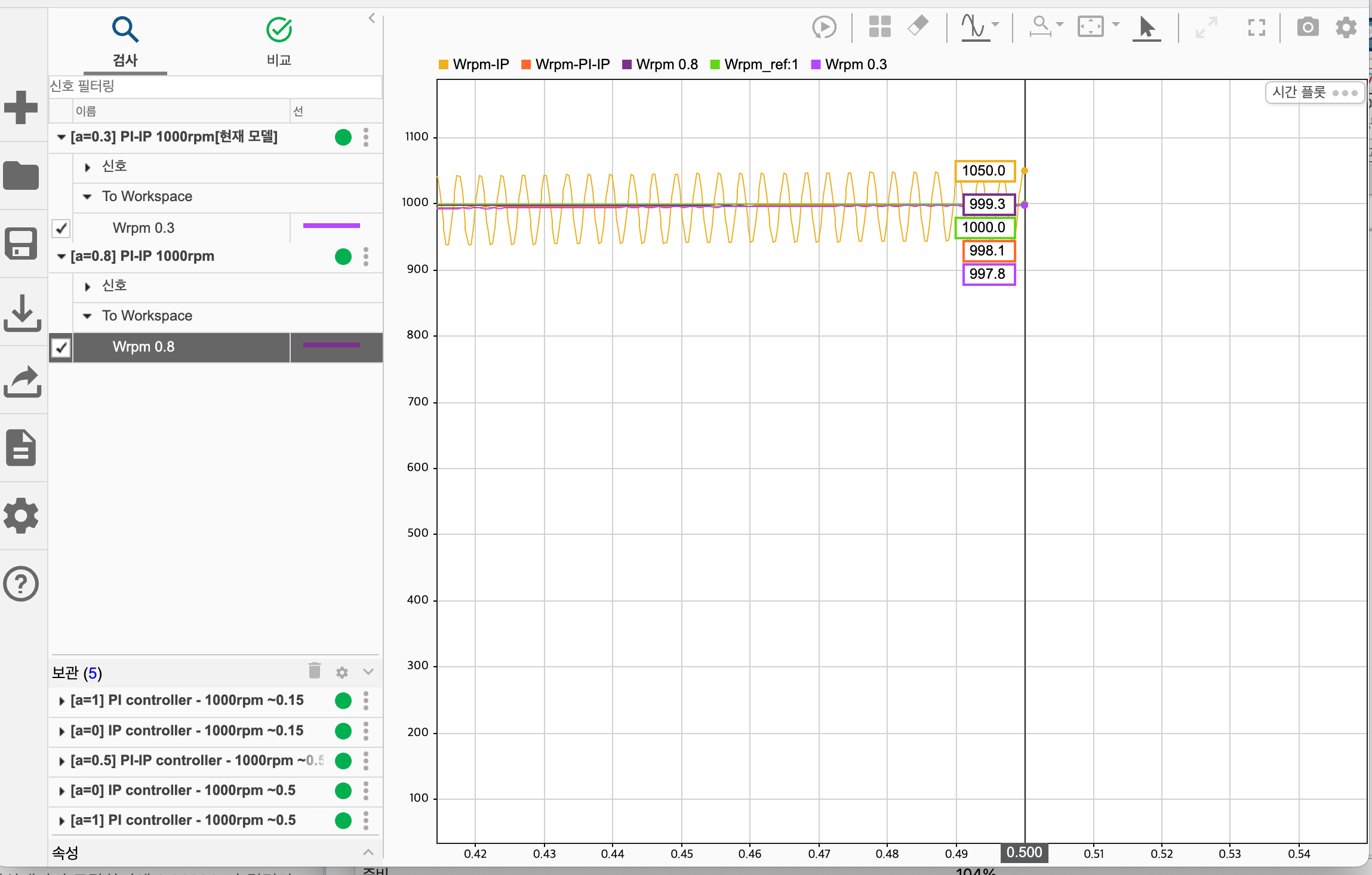
[조건] 0.5s 일 때, 1000rpm 일 때
| PI controller [a=1] | PI-IP controller [a=0.8] | PI-IP controller [a=0.5] | PI-IP controller [a=0.3] | IP controller [a=0] | |
| Wrpm[rpm] | 1000.0 | 999.3 | 998.1 | 997.8 | 1050.0 |
[결론]
0.5s일 때 Controller들을 보았을 때, a의 값이 1에 가까워질 때 (PI controller에 가까워졌을 때) 지령속도인 1000rpm에 더 빨리 도달한 것을 simulation으로 확인하였다.
IP controller일 때는 위아래로 파형이 많이 흔들려서 도달했다고 할 수 없다.
=> PI, PI-IP, IP 특성을 그래프 비교로 확인했다.
4-(1). [a=0] IP controller 지령속도 도달
[Simulation]
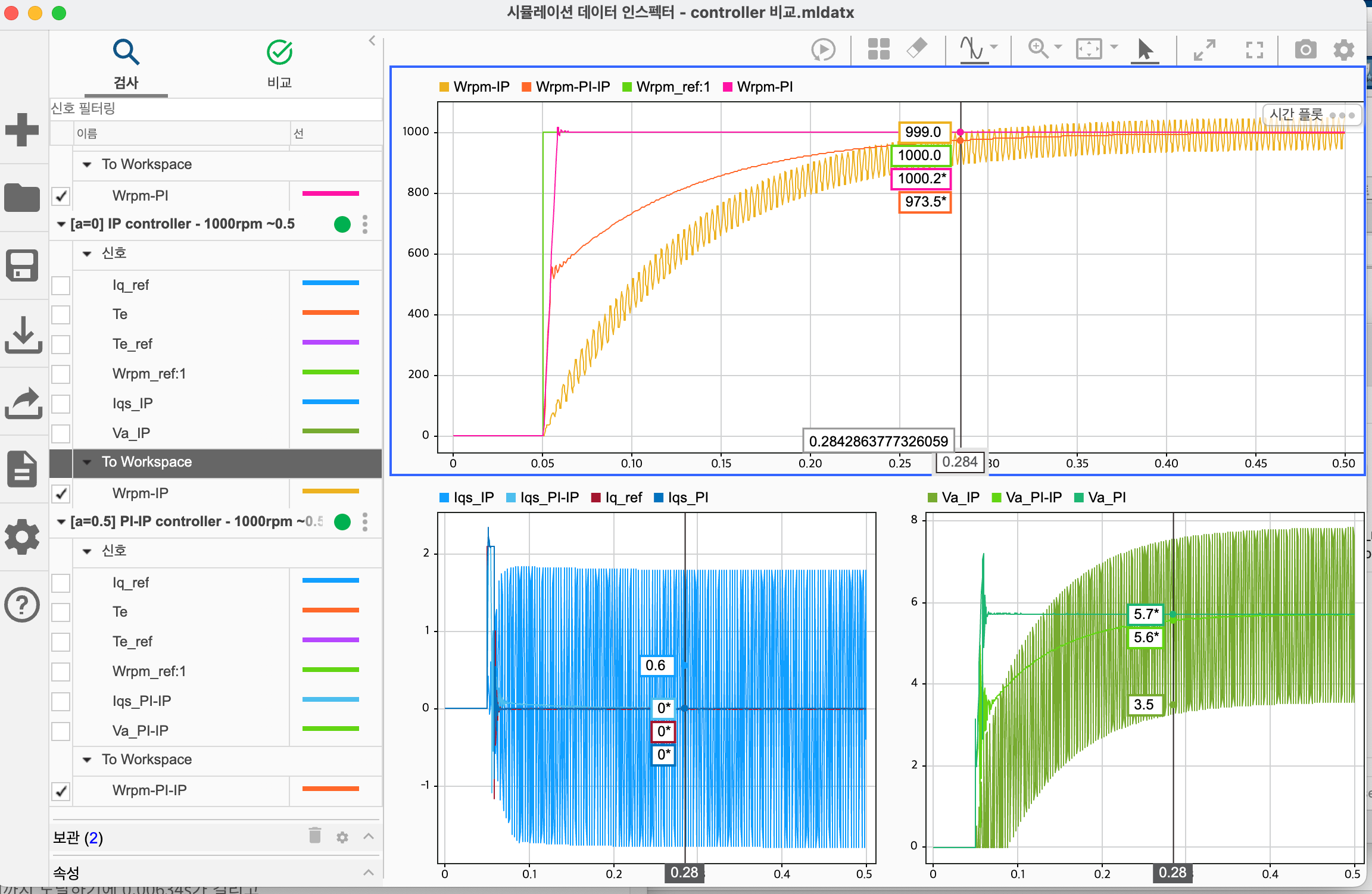
[조건] 0~0.5s 동안, 1000rpm 일 때
| PI controller [a=1] | PI-IP controller [a=0.5] | IP controller [a=0] | |
| Wrpm[rpm] | 1000.2 | 973.5 | 999.0 |
| Iqs[A] | 0 | 0.6 | 0 |
| Va[V] | 5.7 | 5.6 | 3.5 |
[결론]
IP controller은 0.2843s에 지령 속도에 도달하였다.
하지만 지령속도에 도달했다고 할 수 없는게 계속 위 아래로 흔들리는 파형이라 바로 뒤에 1000rpm에 못 미치는 속도에 도달한다.
=> a=0인 완전 IP controller인 경우에는 확실하게 판단이 어렵다.
그래서 정상상태에 도달한 순간의 시간도 알기 쉽지 않다.
5. 실험결론
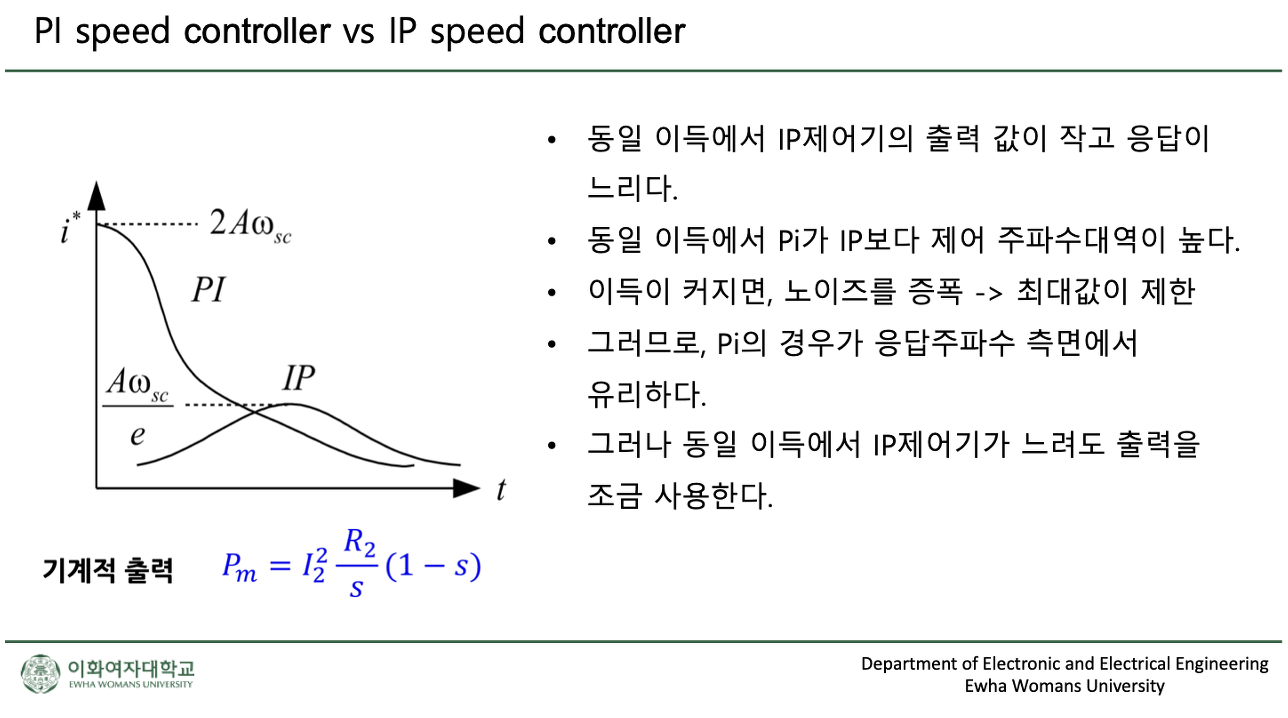
공부했던 내용 대로 IP controller가 낮은 전류를 긴 시간동안 사용해 지령속도에 도달하는 것을 Simulation을 통해 확인하였다.
그만큼 지령속도에 도달하는 시간 또한 오래걸리는 것을 모든 실험을 통해 확인하였다.
또한 동일 이득에서 IP제어기가 느려도 출력을 조금 사용한다는 것을 확인할 방법 공부가 더 필요하다.
=> 그래프 밑의 식을 보며 전류의 제곱과 파워는 비례하기 때문에 전류값을 통해 확인 가능한것?
+ 추가실험필요
동일 이득에서 PI가 IP보다 제어 주파수대역이 높은지, PI의 경우 응답주파수 측면에서 유리한지 추가 실험이 필요하다.
'Project > #2 Hybrid controller(based on PI-IP)' 카테고리의 다른 글
| #5 BLDC(PMSM) [PI-IP controller] Gain 변경 실험 (0) | 2023.03.02 |
|---|---|
| #4 BLDC(PMSM) [PI-IP controller] Gain 값 Tuning (0) | 2023.02.25 |
| #2 BLDC(PMSM) [PI controller] Simulation (0) | 2023.02.23 |
| #1 직류전동기 기계 시스템 Simulink 구현 (PI controller) (1) | 2023.02.23 |
| #0 Motor Default Value & Initial Set (0) | 2023.02.23 |