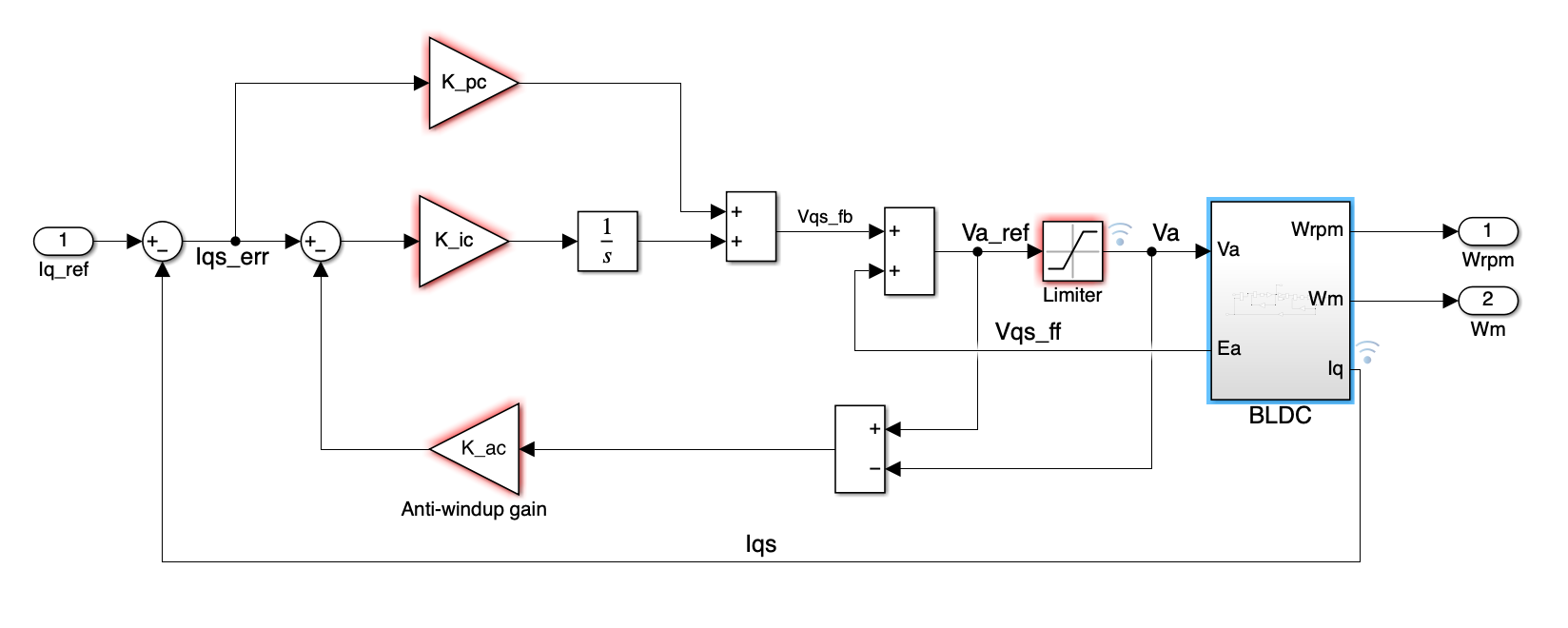
0. Modeling
교수님께서 전류 제어기는 PI-IP로 설계하지 않아도 된다 하셨기에, 속도 제어기만 PI-IP로 설계하고 전류 제어기는 PI제어기로 설계하였다.

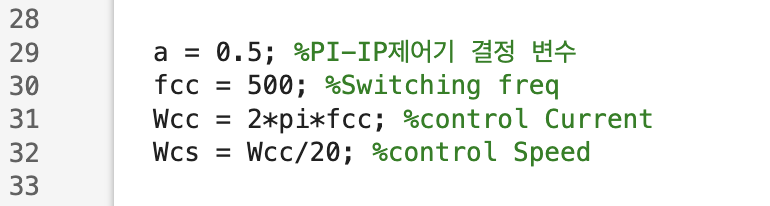
1. 기본 Parameter 설정

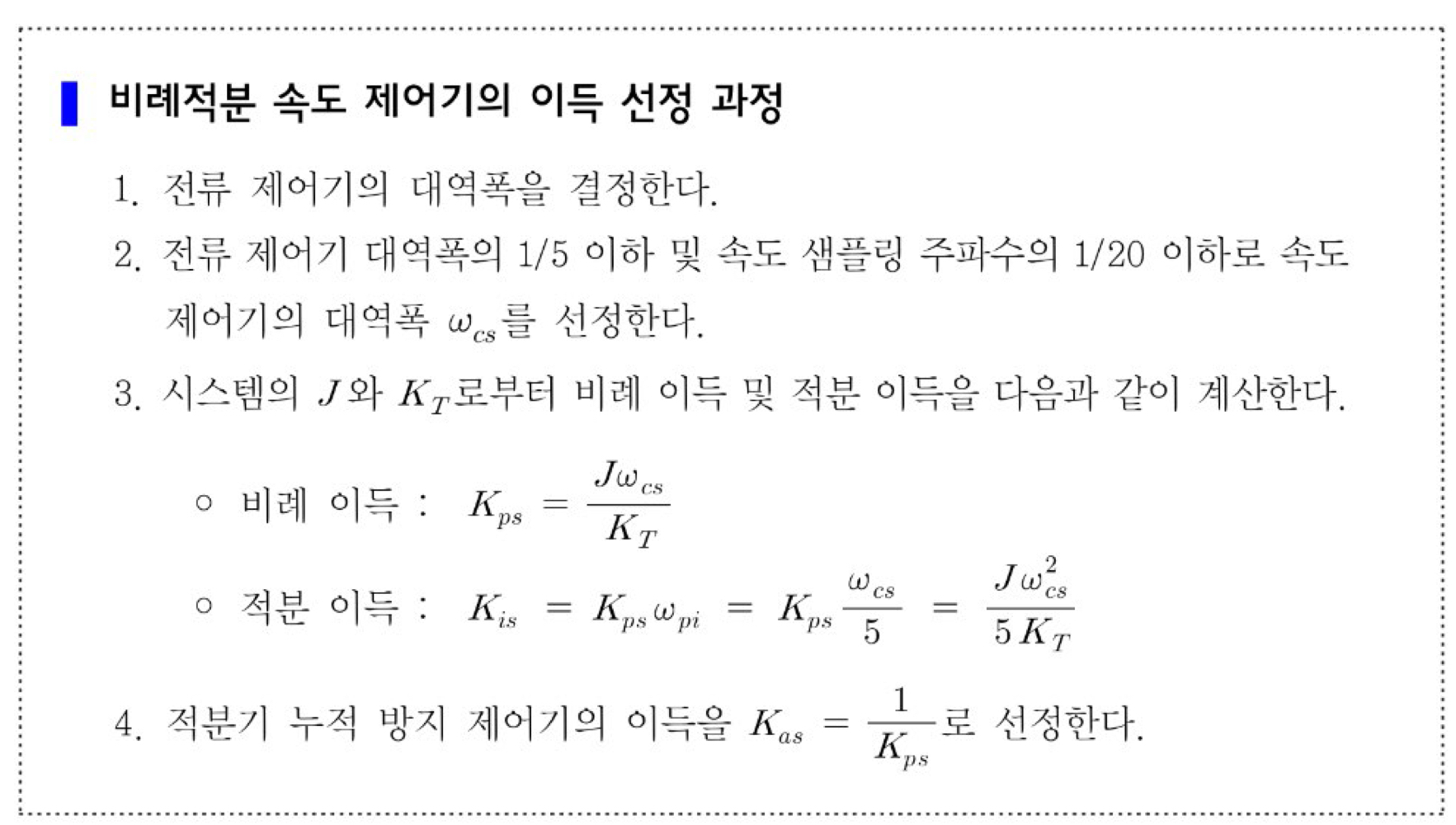
대역폭 Wcs는 속도 샘플링 주파수의 1/20~1/25 정도로 대역폭 Wcs를 선정하는 것이 바람직하다.
예를들어 전류 제어기의 대역폭 Wcc가 500Hz이고 속도 검출 주기가 2ms인 경우 속도 제어기의 대역폭 Wsc는 Wcc/5인 최대 100Hz(628 rad/s) 정도까지 선정하는 것이 가능하다. 그러나 속도의 샘플링 주파수가 500Hz(=1/2ms) 이므로, 대역폭 Wsc는 속도 샘플링 주파수의 1/20인 25Hz 이하로 선정하는 것이 바람직하다.
=> Wcc = 500Hz -> Wsc = 25Hz 둘은 1/20차이
2. 전류 제어기의 gain 선정


2023.03.08 - [Study/Motor Control] - 전류 제어기[Current controller]
전류 제어기[Current controller]
부하의 속도나 위치를 제어하기 위해서는 직류 전동기의 토크 Te 를 제어할 필요가 있으며 이를 위해서 전기자 전류 ia를 제어할 필요가 있다. 0. PI(비례적분) 제어기의 특징 Kp와 Ki는 각각 비례
jgewjsrhdms.tistory.com
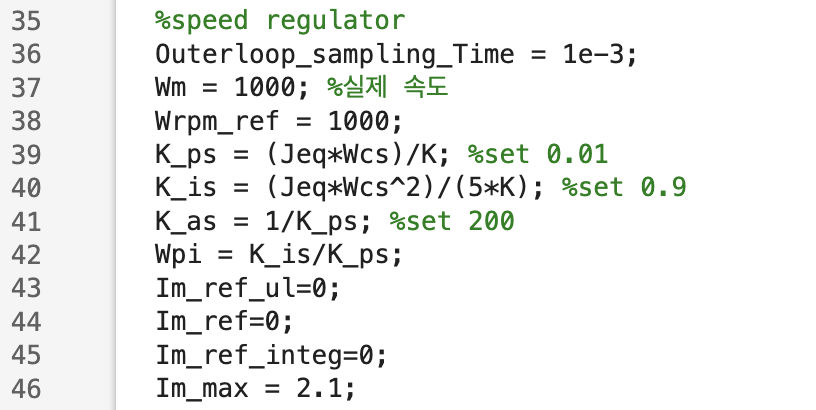
3. 속도 제어기의 gain 선정
2023.03.08 - [Study/Motor Control] - 속도 제어기[Speed controller]
속도 제어기[Speed controller]
jgewjsrhdms.tistory.com
4-(1). [a=0.5] PI-IP controller fcc = 500
4-(2). [a=0.5] PI-IP controller fcc = 1000
4-(3). [a=0.5] PI-IP controller fcc = 2000
5. [a=0.5] PI-IP controller current comparison
(1) fcc = 500 vs 1000
[Simulation]
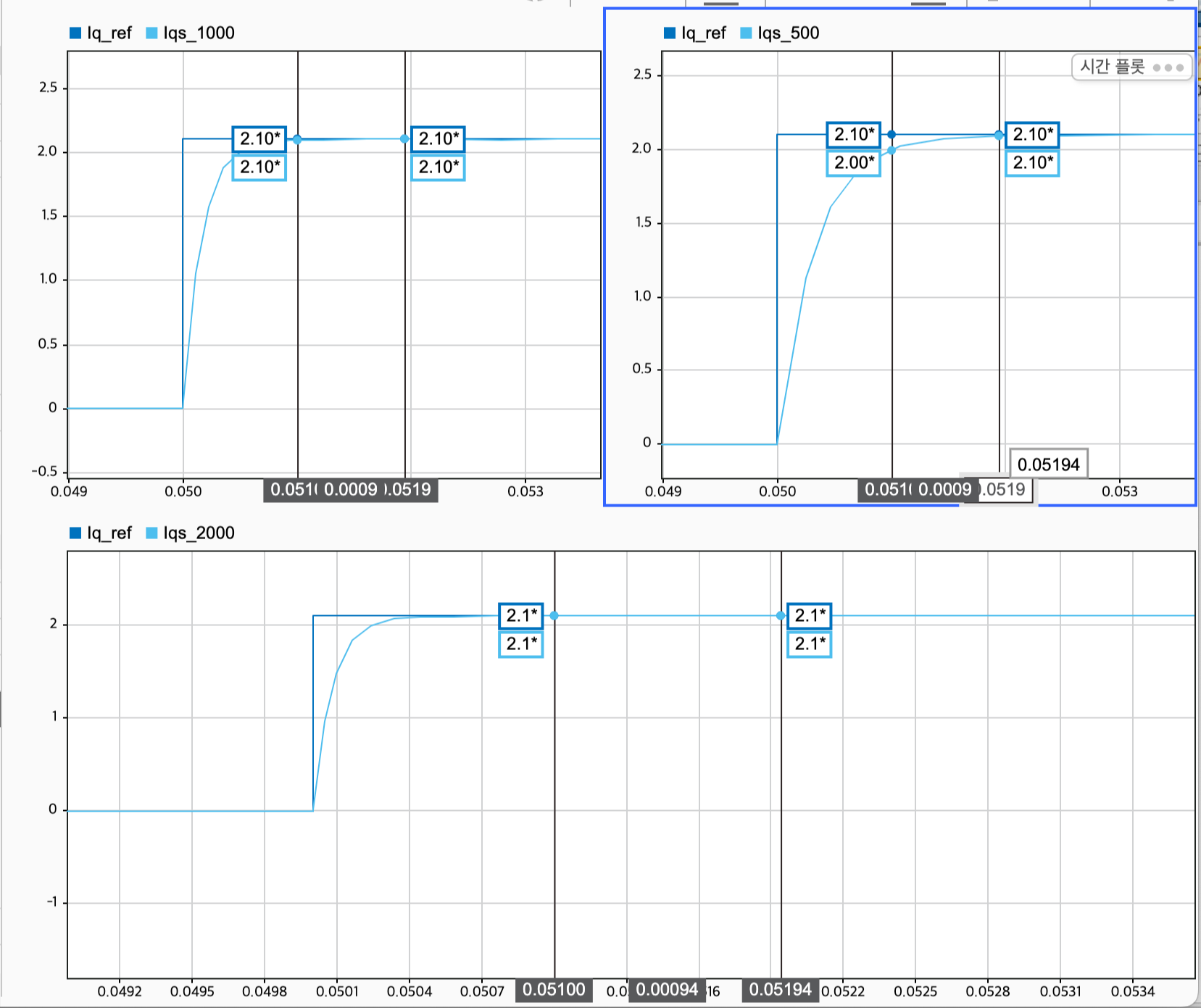
| 500Hz | 1000Hz | |
| 지령 전류 도달 (s) | 0.05194 | 0.05100 |
| fcc = 500 지령 전류 도달 (A) | 2.10 | 2.10 |
| fcc = 1000 지령 전류 도달 (A) | 2.00 | 2.10 |
500Hz보다 1000Hz일 때 지령 전류에 더 빨리 도달한다.
(2) fcc = 1000 vs 2000
[Simulation]
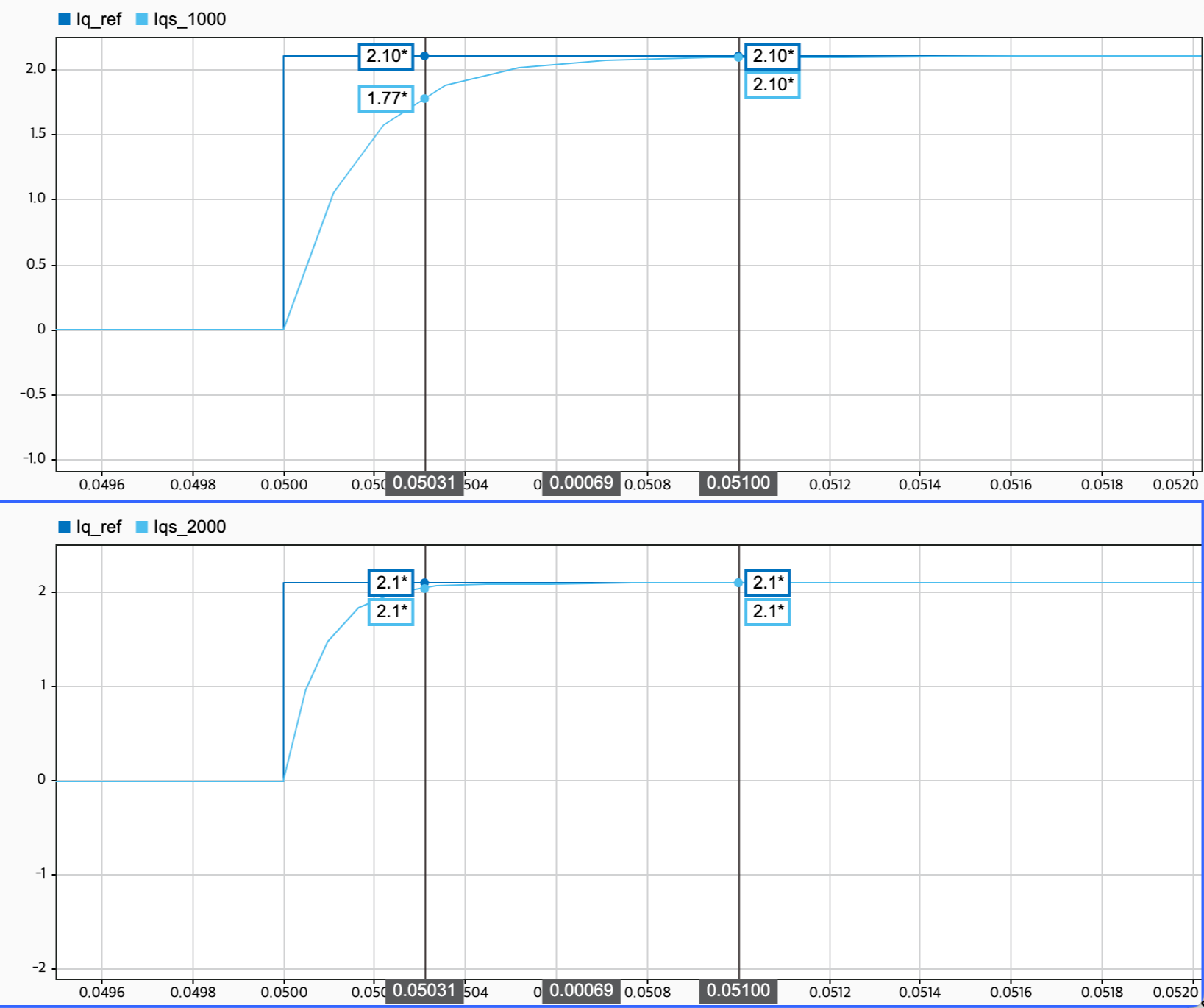
| 1000Hz | 2000Hz | |
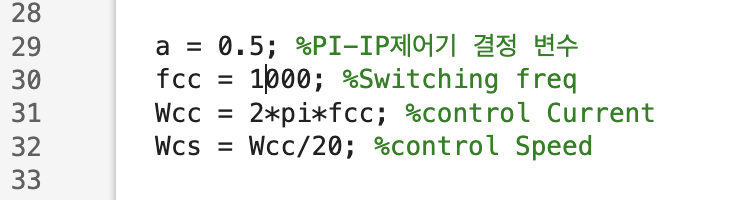
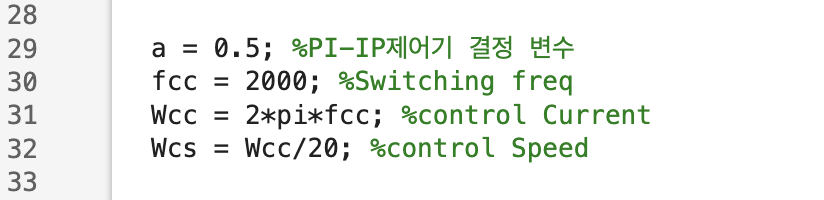
| 지령 전류 도달 (s) | 0.05100 | 0.05031 |
| fcc = 1000 지령 전류 도달 (A) | 2.10 | 2.10 |
| fcc = 2000 지령 전류 도달 (A) | 1.77 | 2.10 |
1000Hz보다 2000Hz일 때 지령 전류에 더 빨리 도달한다.
(3) fcc = 500 vs 2000
[Simulation]
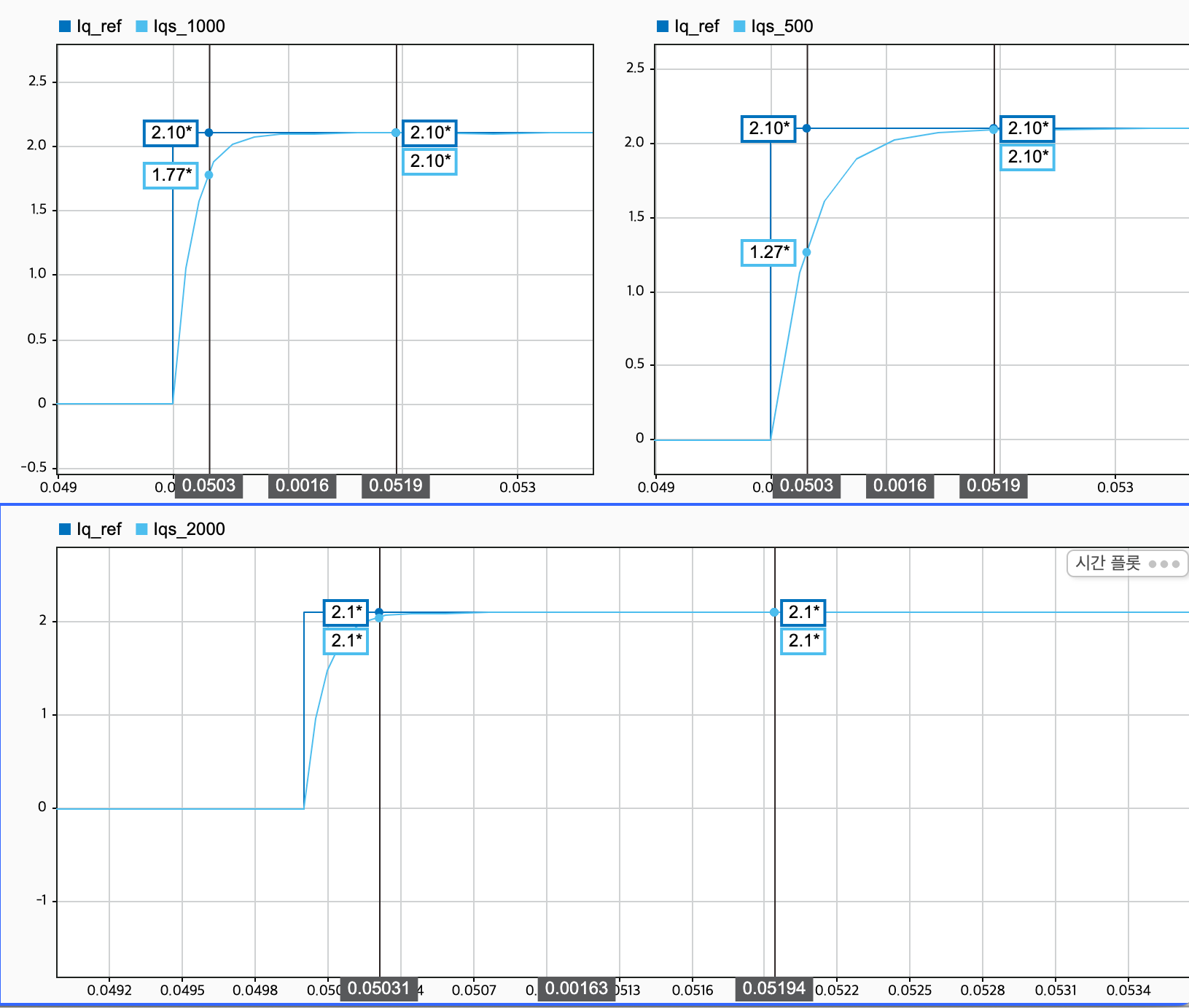
| 500Hz | 2000Hz | |
| 지령 전류 도달 (s) | 0.0519 | 0.05031 |
| fcc = 500 지령 전류 도달 (A) | 2.10 | 2.10 |
| fcc = 2000 지령 전류 도달 (A) | 1.27 | 2.10 |
[비교 결론]
| 500Hz | 1000Hz | 2000Hz | |
| 지령 전류 도달 (s) | 0.0519 | 0.05100 | 0.05031 |
| fcc = 2000 지령 전류 도달 (A) | 1.27 | 1.77 | 2.10 |
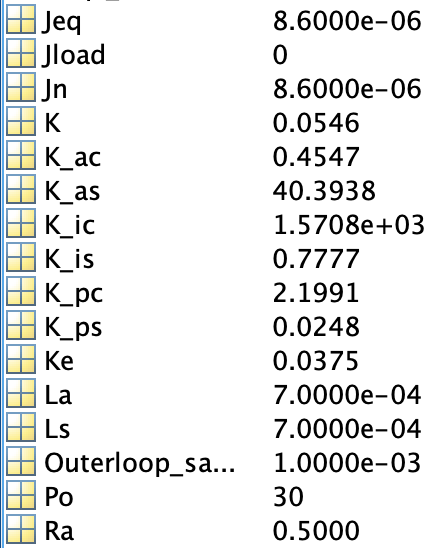
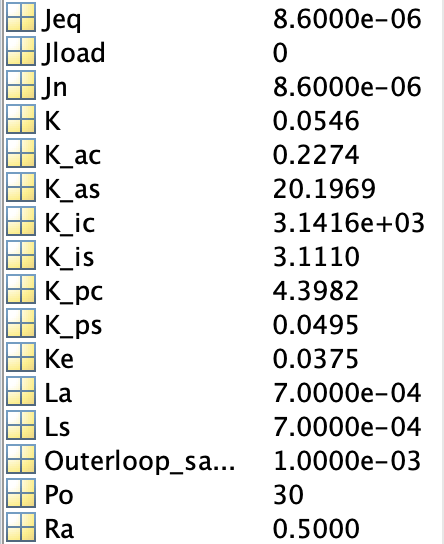
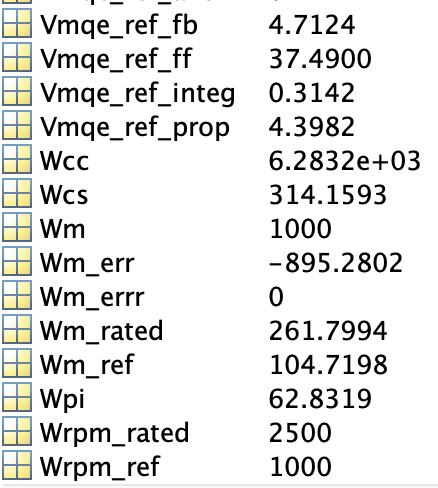
| Kpc | 2.1991 | 4.3982 | 8.7965 |
| Kic | 1.5708*10^3 | 3.1416*10^3 | 6.2832*10^3 |
| Kac | 0.4547 | 0.2274 | 0.1137 |
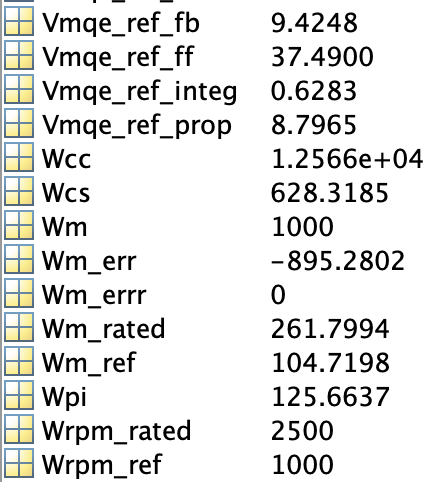
| Wcc (Hz) | 3.1416*10^3 | 6.2832*10^3 | 1.2566*10^4 |
스위칭 주파수가 더 클수록 지령 전류에 더 빨리 도달하며, 비례 적분 gain들은 커지고 안티 와인드업 gain은 작아진다.
=> 제어 대역폭이 클수록 실제 전류 Ia가 지령 전류 Ia_ref를 추종하는 속응성이 향상됨을 알 수 있다.
제어기의 대역폭 wcc(=Kpc/La)는 비례 이득 Kpc에 비례하는데, 결론도 주파수가 커질수록 Kpc가 커진다.
따라서 속응성을 향상시키기 위해 대역폭을 크게 하려면 비례 이득 Kpc를 크게 하면된다.
6. [a=0.5] PI-IP controller Speed comparison
(1) fcc = 500 vs 1000
[Simulation]
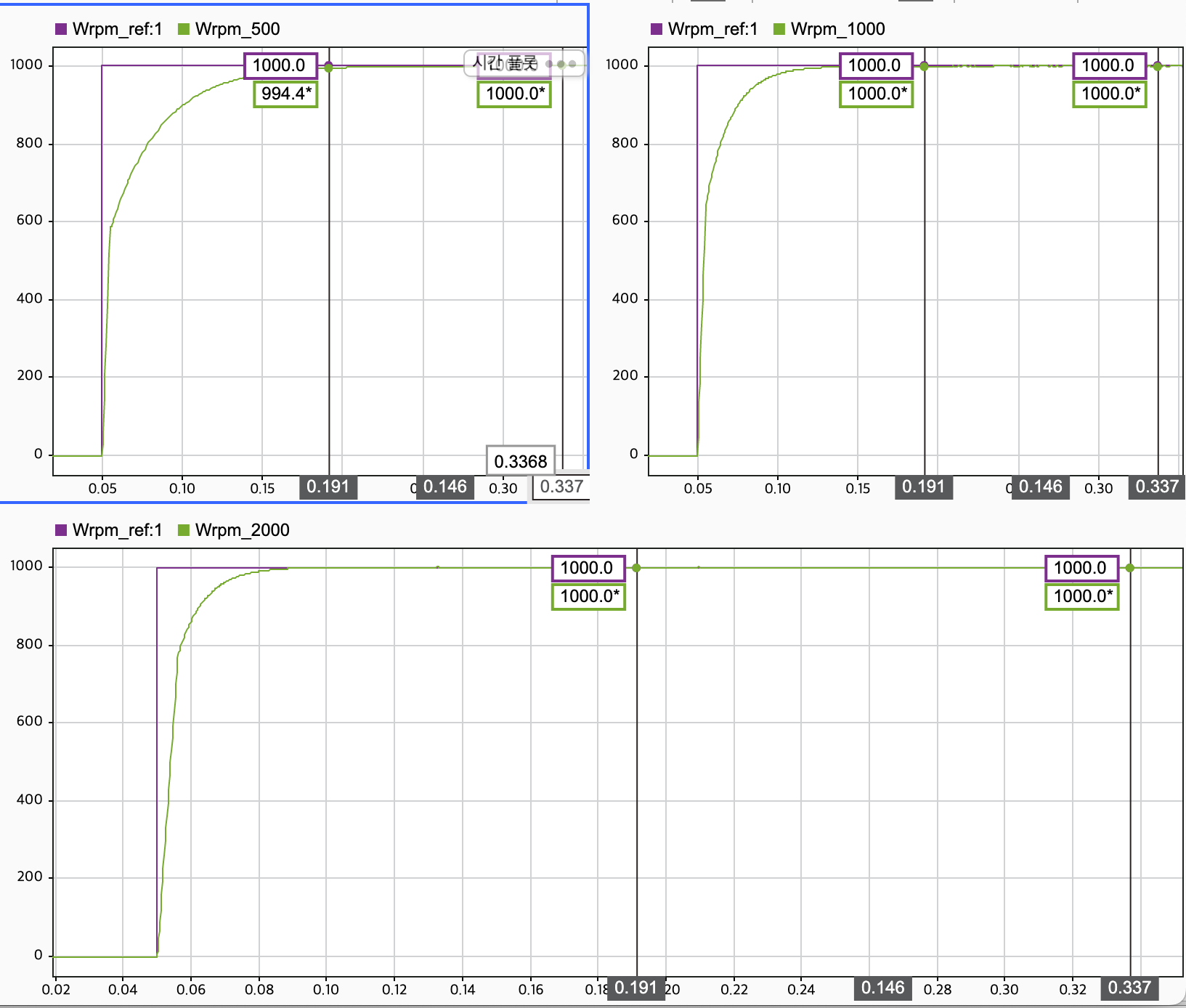
| 500Hz | 1000Hz | |
| 지령 속도 도달 (s) | 0.3368 | 0.1913 |
| fcc = 500 지령 속도 도달 (rpm) | 1000.0 | 1000.0 |
| fcc = 1000 지령 전류 도달 (rpm) | 994.4 | 1000.0 |
(2) fcc = 500 vs 1000
[Simulation]
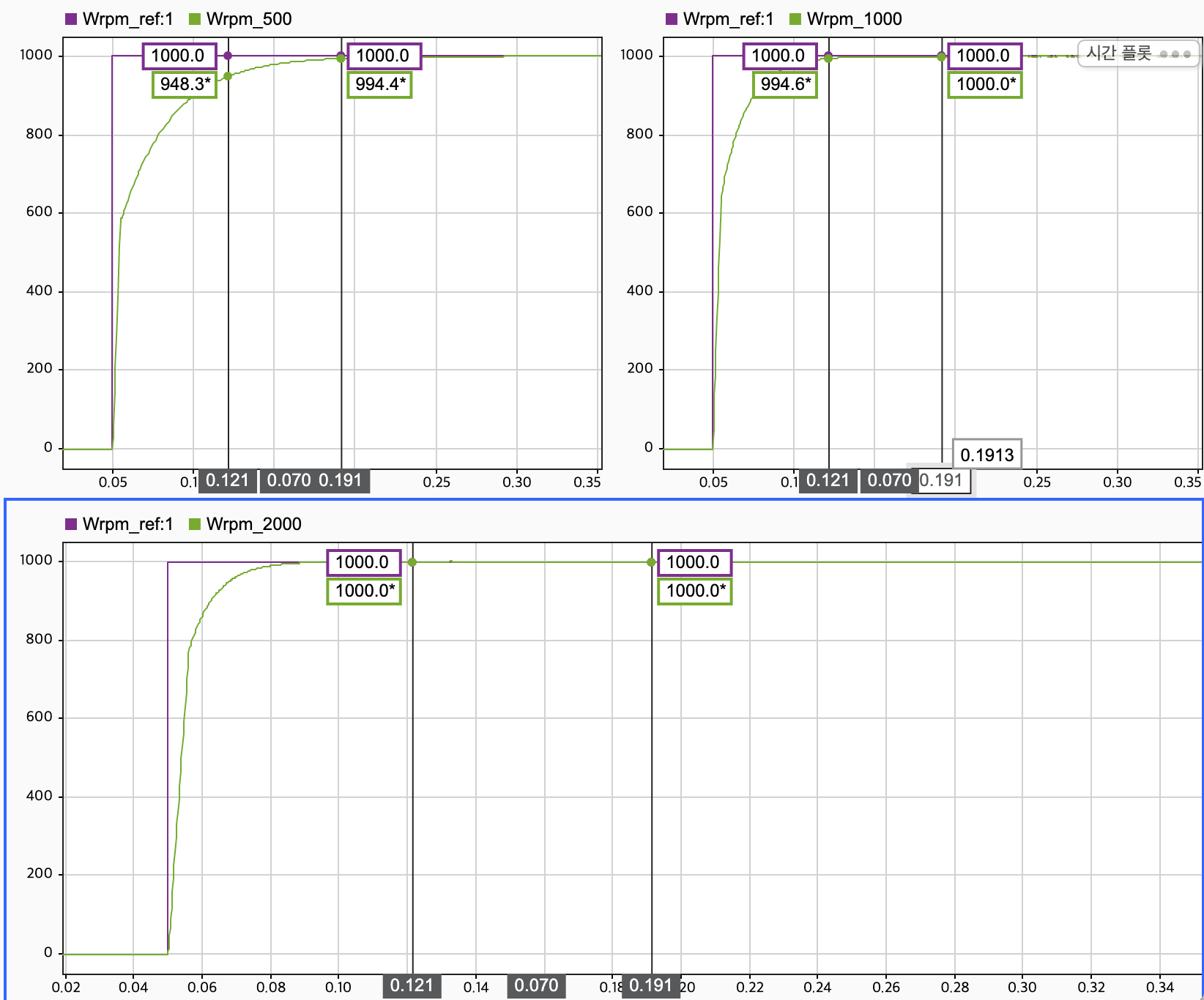
| 1000Hz | 2000Hz | |
| 지령 속도 도달 (s) | 0.1913 | 0.1214 |
| fcc = 1000 지령 속도 도달 (rpm) | 1000.0 | 1000.0 |
| fcc = 2000 지령 전류 도달 (rpm) | 994.6 | 1000.0 |
(3) fcc = 500 vs 2000
[Simulation]
| 500Hz | 2000Hz | |
| 지령 속도 도달 (s) | 0.3368 | 0.1214 |
| fcc = 500 지령 속도 도달 (rpm) | 1000.0 | 1000.0 |
| fcc = 2000 지령 전류 도달 (rpm) | 948.3 | 1000.0 |
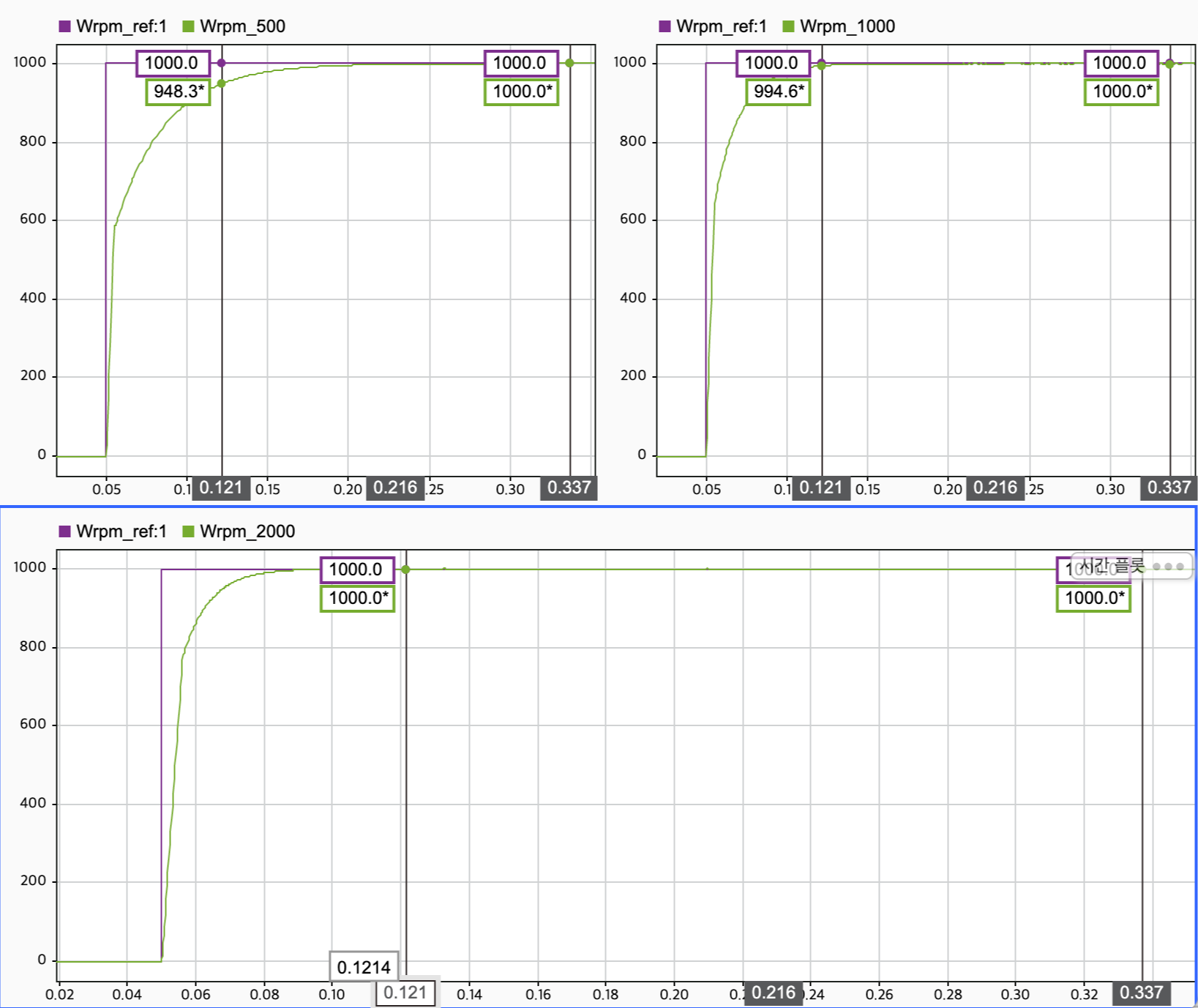
[비교 결론]
| 500Hz | 1000Hz | 2000Hz | |
| 지령 속도 도달 (s) | 0.3368 | 0.1913 | 0.1214 |
| fcc = 2000 지령 속도 도달 (rpm) | 948.3 | 994.6 | 1000.0 |
| Kps | 0.0248 | 0.0495 | 0.0990 |
| Kis | 0.7777 | 3.1110 | 12.4439 |
| Kas | 40.3938 | 20.1969 | 10.0985 |
| Wcc (Hz) | 3.1416*10^3 | 6.2832*10^3 | 1.2566*10^4 |
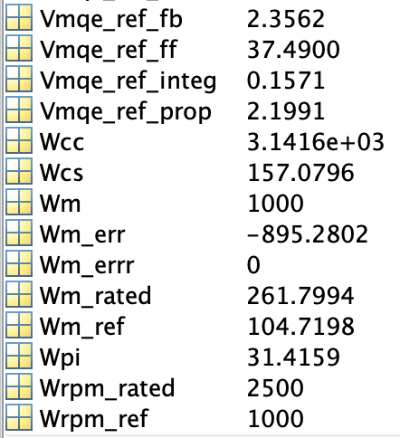
| Wcs (Hz) | 157.0796 | 314.1593 | 628.3185 |
| Wpi (Hz) | 31.4159 | 62.8319 | 125.6637 |
스위칭 주파수가 더 클수록 지령 속도에 더 빨리 도달하며, 비례 적분 gain들은 커지고 안티 와인드업 gain은 작아진다.
Wcc, Wcs, Wpi 모두 주파수가 커질수록 같이 증가한다.
=> 속도 제어기의 대역폭은 전류 제어기 대역폭의 1/5이하로 주어져야 한다.
제어 대역폭이 큰 경우 속도 응답성이 빠르며 (PI제어기에서)오버슈트도 감소한다.
7. 결론
| 500Hz | 1000Hz | 2000Hz | |
| 지령 전류 도달 (s) | 0.0519 | 0.05100 | 0.05031 |
| 지령 속도 도달 (s) | 0.3368 | 0.1913 | 0.1214 |
| fcc = 2000 지령 전류 도달 (A) | 1.27 | 1.77 | 2.10 |
| fcc = 2000 지령 속도 도달 (rpm) | 948.3 | 994.6 | 1000.0 |
| Kpc | 2.1991 | 4.3982 | 8.7965 |
| Kic | 1.5708*10^3 | 3.1416*10^3 | 6.2832*10^3 |
| Kac | 0.4547 | 0.2274 | 0.1137 |
| Kps | 0.0248 | 0.0495 | 0.0990 |
| Kis | 0.7777 | 3.1110 | 12.4439 |
| Kas | 40.3938 | 20.1969 | 10.0985 |
| Wcc (Hz) | 3.1416*10^3 | 6.2832*10^3 | 1.2566*10^4 |
| Wcs (Hz) | 157.0796 | 314.1593 | 628.3185 |
| Wpi (Hz) | 31.4159 | 62.8319 | 125.6637 |
Wcc (Hz)과 Wcs (Hz)는 1/20 차이가 난다.
교수님께서 보통 속도제어기 bandwidth 는 전류제어기에 비해 1/20~1/100 으로 훨씬 낮게 설정한다고 하셨다.
'Project > #2 Hybrid controller(based on PI-IP)' 카테고리의 다른 글
| #8 BLDC(PMSM) [PI-IP controller] Simulation set_2 (0) | 2023.03.14 |
|---|---|
| #7 BLDC(PMSM) [PI-IP controller] Simulation set_1 (0) | 2023.03.14 |
| [LAB #3] PI-IP gain 실험 (0) | 2023.03.03 |
| #5 BLDC(PMSM) [PI-IP controller] Gain 변경 실험 (0) | 2023.03.02 |
| #4 BLDC(PMSM) [PI-IP controller] Gain 값 Tuning (0) | 2023.02.25 |