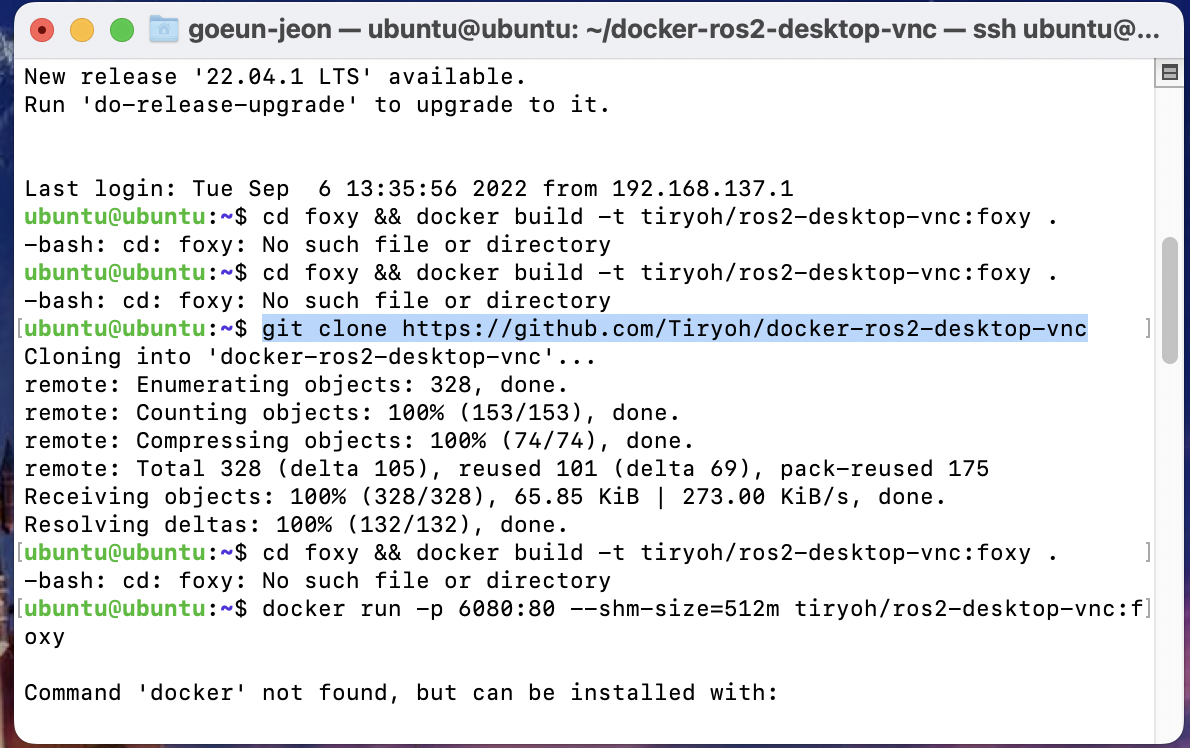
1. ros melodic 잘 다운되었는지 확인 2. omorobot 설치 cd ros_catkin_ws/src git clone https://github.com/omorobot/omo_r1mini 3. rplidar melodic버전 설치 git clone https://github.com/Slamtec/rplidar_ros.git ***오류 =>해결 cd ros_catkin_ws/src/rplidar_ros 패키지에 Cmakefiles에 저 단락에 + std_srvs를 추가해준다. https://github.com/Slamtec/rplidar_ros/pull/27 fix missing std_srv dependency when compiling in isolation by phil123456 · P..