Cartographer ROS를 빌드하기 위해 wstool 과 rosdep 설치
https://google-cartographer-ros.readthedocs.io/en/latest/compilation.html
Compiling Cartographer ROS — Cartographer ROS documentation
Building & Installation In order to build Cartographer ROS, we recommend using wstool and rosdep. For faster builds, we also recommend using Ninja. On Ubuntu Focal with ROS Noetic use these commands to install the above tools: sudo apt-get update sudo apt-
google-cartographer-ros.readthedocs.io
참고(자세함)
https://varhowto.com/install-ros-noetic-ubuntu-20-04/
How to Install ROS Noetic on Ubuntu 20.04 - VarHowto
ros-noetic-desktop is a trimmed-down version of ros-noetic-desktop-full, also containing most tutorials packages. Specifically, it includes the following
varhowto.com
On Ubuntu Focal with ROS Noetic use these commands to install the above tools:
sudo apt-get update
sudo apt-get install -y python3-wstool python3-rosdep ninja-build stow
On older distributions:
sudo apt-get update
sudo apt-get install -y python-wstool python-rosdep ninja-build stow

After the tools are installed, create a new cartographer_ros workspace in ‘catkin_ws’.
mkdir catkin_ws
cd catkin_ws
wstool init src
wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall
wstool update -t src
Now you need to install cartographer_ros’ dependencies. First, we use rosdep to install the required packages. The command ‘sudo rosdep init’ will print an error if you have already executed it since installing ROS. This error can be ignored.
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
# Only on Ubuntu 16 / ROS Kinetic: src/cartographer/scripts/install_proto3.sh
=> 오류 발생시 글 맨 아래 확인
Cartographer uses the abseil-cpp library that needs to be manually installed using this script:
src/cartographer/scripts/install_abseil.sh
Due to conflicting versions you might need to uninstall the ROS abseil-cpp using
sudo apt-get remove ros-${ROS_DISTRO}-abseil-cpp
Build and install.
catkin_make_isolated --install --use-ninjaThis builds Cartographer from the latest HEAD of the master branch. If you want a specific version, you need to change the version in the cartographer_ros.rosinstall.
-> 설정 내용 저장
source /home/goeun-jeon/catkin_ws/install_isolated/setup.bash
***오류 발생
-> 해결
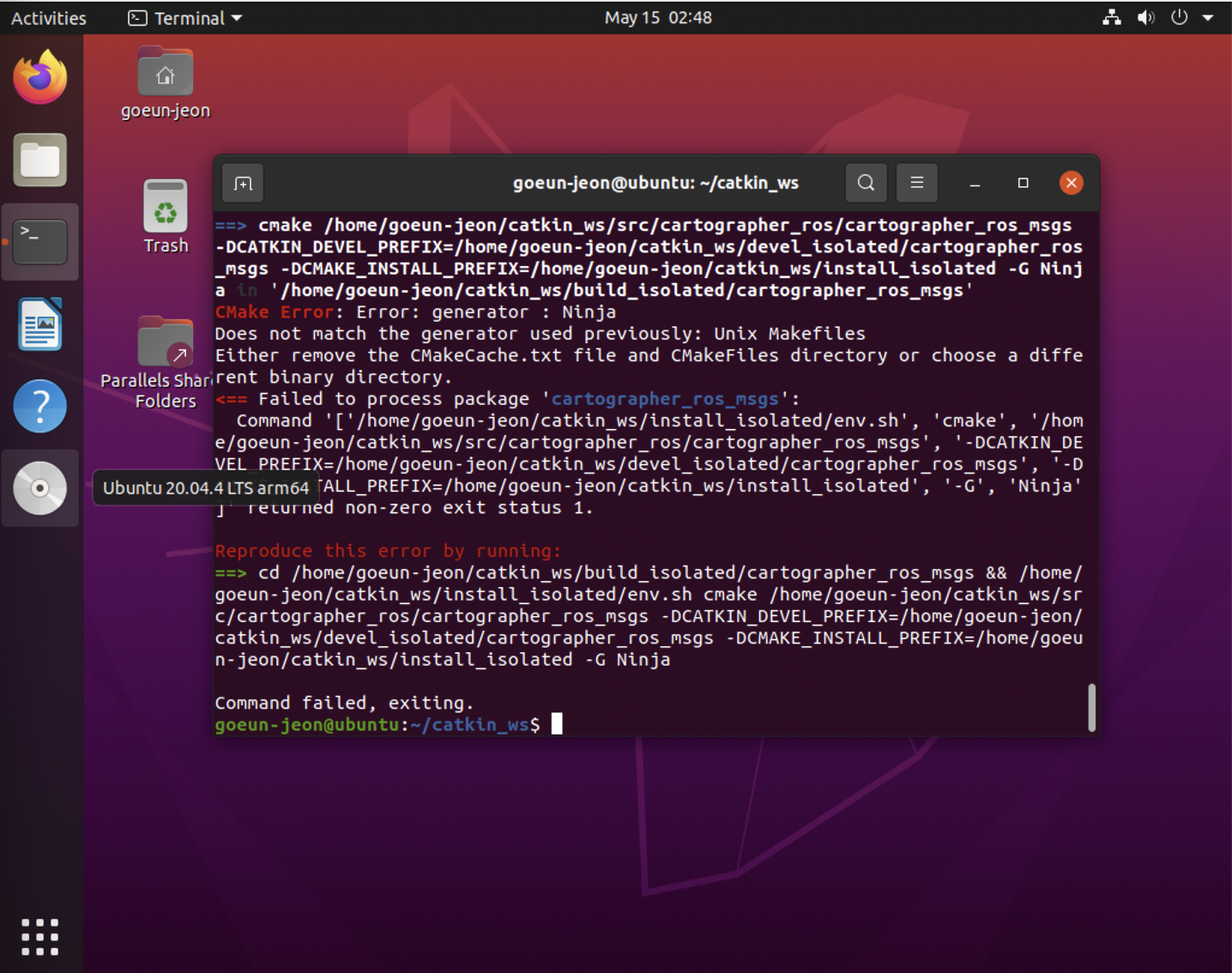
Make Error: Error: generator : Ninja
Does not match the generator used previously: Unix Makefiles
Either remove the CMakeCache.txt file and CMakeFiles directory or choose a different binary directory.
<== Failed to process package 'cartographer_ros':
라는 오류가 발생하면
cartographer_ros 파일로 들어가서CMakeCache.txt 파일을 지워준다.
CMake Error: Error: generator : Ninja
Does not match the generator used previously: Unix Makefiles
Either remove the CMakeCache.txt file and CMakeFiles directory or choose a different binary directory.
<== Failed to process package 'cartographer_rviz':
라는 오류 발생
cartographer_rviz 파일로 들어가서 CMakeCache.txt 파일을 지워준다.

-> 성공 설치 완료

***오류 발생

-> 해결
git clone
***desktop 설치 중에 오류 발생
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y<= 이 단락에서 오류 발생
오류 내용
:ERROR: the dollowing packages/stacks could not have their keys resolved to system dependencies:
cartographer : [libabsl.dev] defined as "net available" for OS version [focal]
-> !해결!
catkin_ws 파일 -> cartographer 파일 -> package.xml 파일에서 46번째 줄 <depend>libabsl-dev</depend> 삭제하기
그러고 다시 위 코드 재 실행하고 기다리면 #All required rosdeps installed successfully가 나온다.
'Project > #1 AI 기반 자율주행 로봇을 이용한 매장 관리' 카테고리의 다른 글
| #0. 프로젝트 진행 순서 (0) | 2022.05.15 |
|---|---|
| +. Ubuntu 20.4 에서 Rviz 실행 방법 (0) | 2022.05.15 |
| #4. Cartographer 데모 백에서 지도 제작자 ROS 실행 및 Cartographer 저장 (0) | 2022.05.15 |
| #2. ROS - 기본 ROS설치(and 삭제 방법) (0) | 2022.05.13 |
| #1. ROS - 맥북 M1에서 Ubuntu 20.4 설치 (2) | 2022.05.13 |