https://google-cartographer-ros.readthedocs.io/en/latest/demos.html
Running Cartographer ROS on a demo bag — Cartographer ROS documentation
Running Cartographer ROS on a demo bag Now that Cartographer and Cartographer’s ROS integration are installed, you can download example bags (e.g. 2D and 3D backpack collections of the Deutsches Museum) to a known location, in this case ~/Downloads, and
google-cartographer-ros.readthedocs.io
*정상 작동 Test
설치한 Cartographer의 정상 동작을 확인하기 위해 데모용 backpack 파일을 다운로드 한다.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
다운로드 받은 backpack 파일을 실행하기 위해 패키지를 데모 백팩 패키지를 사용한다.
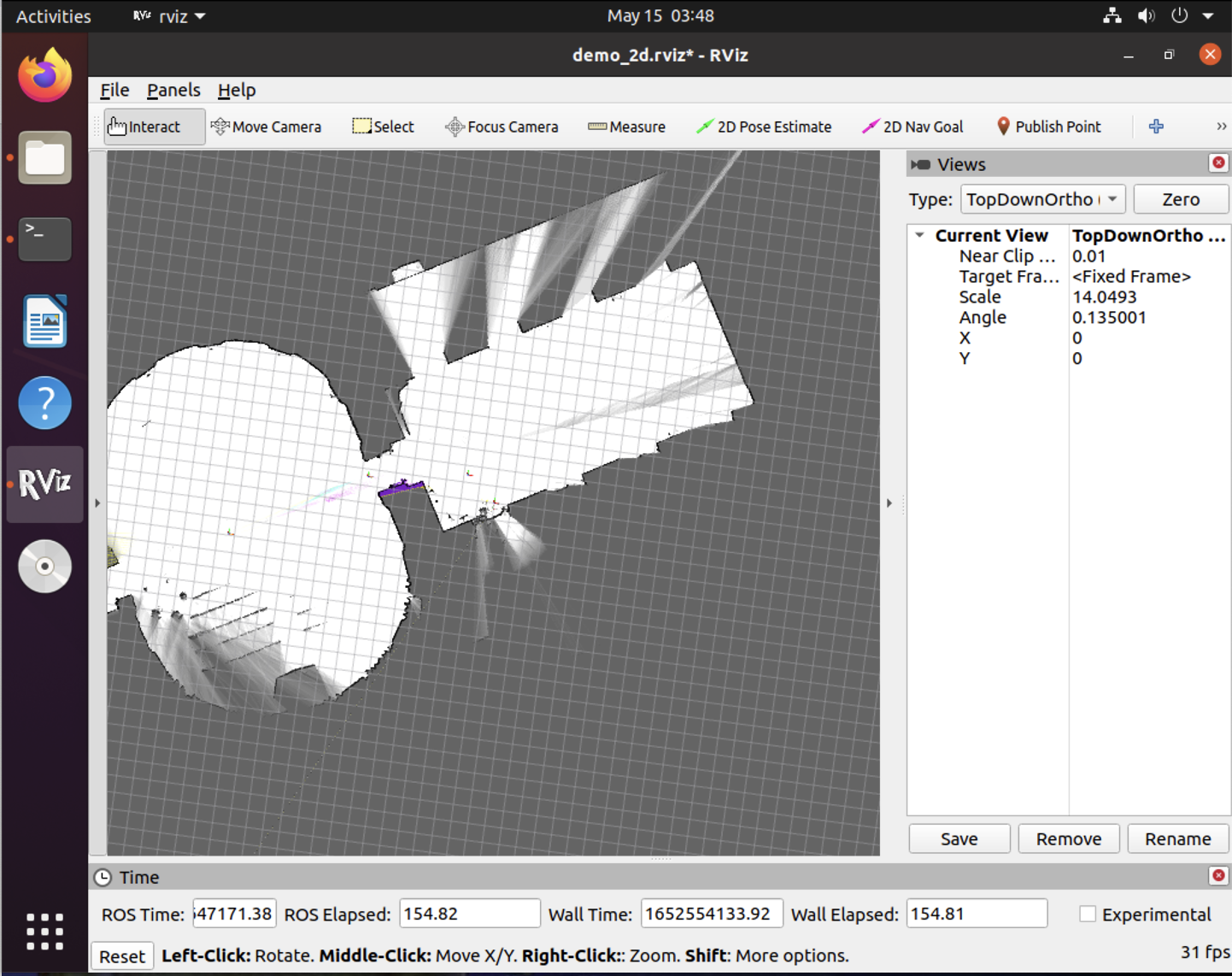
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
-> 실행 창
catkin_ws로 이동하여 catkin_make_isolated 명령을 실행하여 컴파일을 진행한다
cd catkin_make
catkin_make_isolated
cartogrpher의 설치 내용을 터미널 실행시 적용하기 위해서는 .bashrc 파일에 setup.bash 실행 내용을 추가해야 한다.
cd ~/
gedit .bashrc-> 맨 아래에 추가
source ~/catkin_ws/install_isolated/setup.bash

*재실행 할 때
cd catkin_ws-> catkin_ws 파일 접근
*접근 해지
cd
'Project > #1 AI 기반 자율주행 로봇을 이용한 매장 관리' 카테고리의 다른 글
| #0. 프로젝트 진행 순서 (0) | 2022.05.15 |
|---|---|
| +. Ubuntu 20.4 에서 Rviz 실행 방법 (0) | 2022.05.15 |
| #3. ROS - Noetic&Cartographer 설치 (0) | 2022.05.13 |
| #2. ROS - 기본 ROS설치(and 삭제 방법) (0) | 2022.05.13 |
| #1. ROS - 맥북 M1에서 Ubuntu 20.4 설치 (2) | 2022.05.13 |