1. ros melodic 잘 다운되었는지 확인

2. omorobot 설치
cd ros_catkin_ws/src
git clone https://github.com/omorobot/omo_r1mini
3. rplidar melodic버전 설치
git clone https://github.com/Slamtec/rplidar_ros.git***오류

=>해결
cd ros_catkin_ws/src/rplidar_ros 패키지에 Cmakefiles에 저 단락에 + std_srvs를 추가해준다.

https://github.com/Slamtec/rplidar_ros/pull/27
fix missing std_srv dependency when compiling in isolation by phil123456 · Pull Request #27 · Slamtec/rplidar_ros
when compiling with catkin_build_isolated or build tools, std_srvs dependency was missing
github.com
4. catkin_make
catkin_make
***오류

=>해결
sudo chown $USER: -R /home/pi/ros_catkin_ws
catkin_make #안되면 catkin_make_isolated아마 이게 새로운 작업공간에 빌드,,? 하게 해주는 것 같다.
***roscore에서 생기는 오류
ERROR: cannot launch node of type [rosout/rosout]: Cannot locate node of type [rosout] in package [rosout]. Make sure file exists in package path and permission is set to executable (chmod +x)
=>해결
nano ~/.bashrc에 들어가서 확인
source /opt/ros/melodic/setup.bash
source ~/ros_catkin_ws/devel_isolated/setup.bash
이렇게 설정 되어 있어야 한다.
5. 로봇 주행
USB연결로 TX/RX통신이 가능하다.
아래 사진처럼
연결되어있는 USB port를 확인 teleop시행 시 뒤에 이곳에 연결하라는 커밋 달아주어야함.
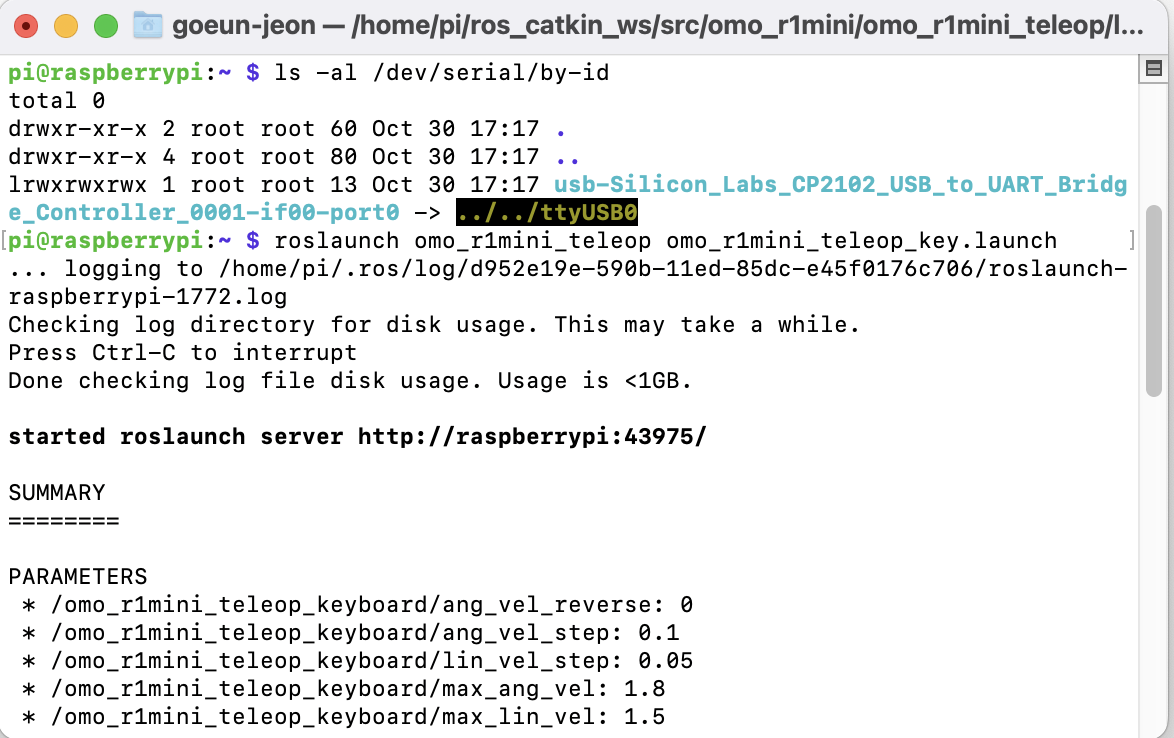
1) terminal 1 : roscore시행
roscore
2) terminal 2 : teleop //USB일때
roslaunch omo_r1mini_bringup omo_r1mini_bringup.launch set_port:=/dev/ttyUSB0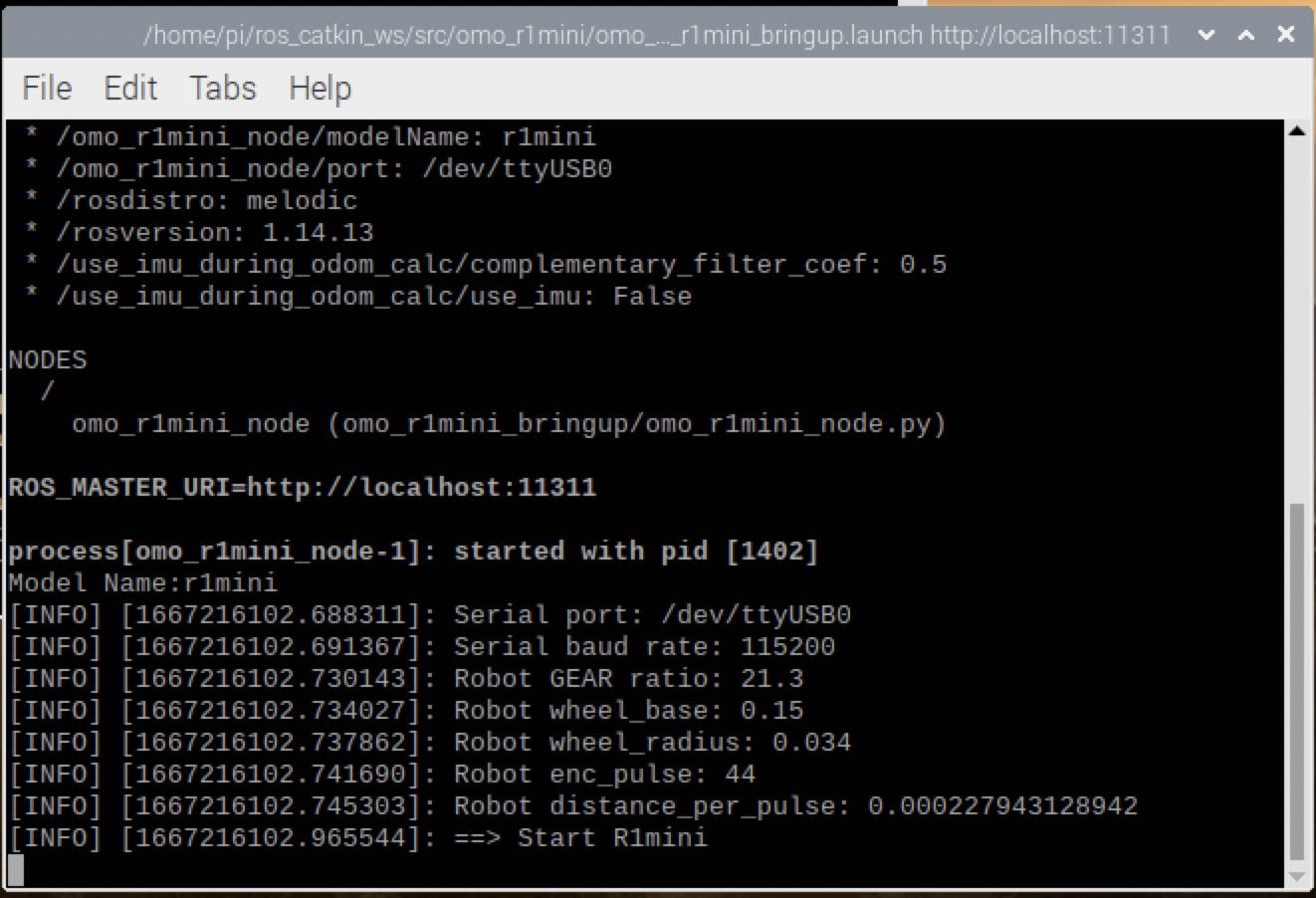
3) terminal 3 : keyboard
roslaunch omo_r1mini_teleop omo_r1mini_teleop_key.launch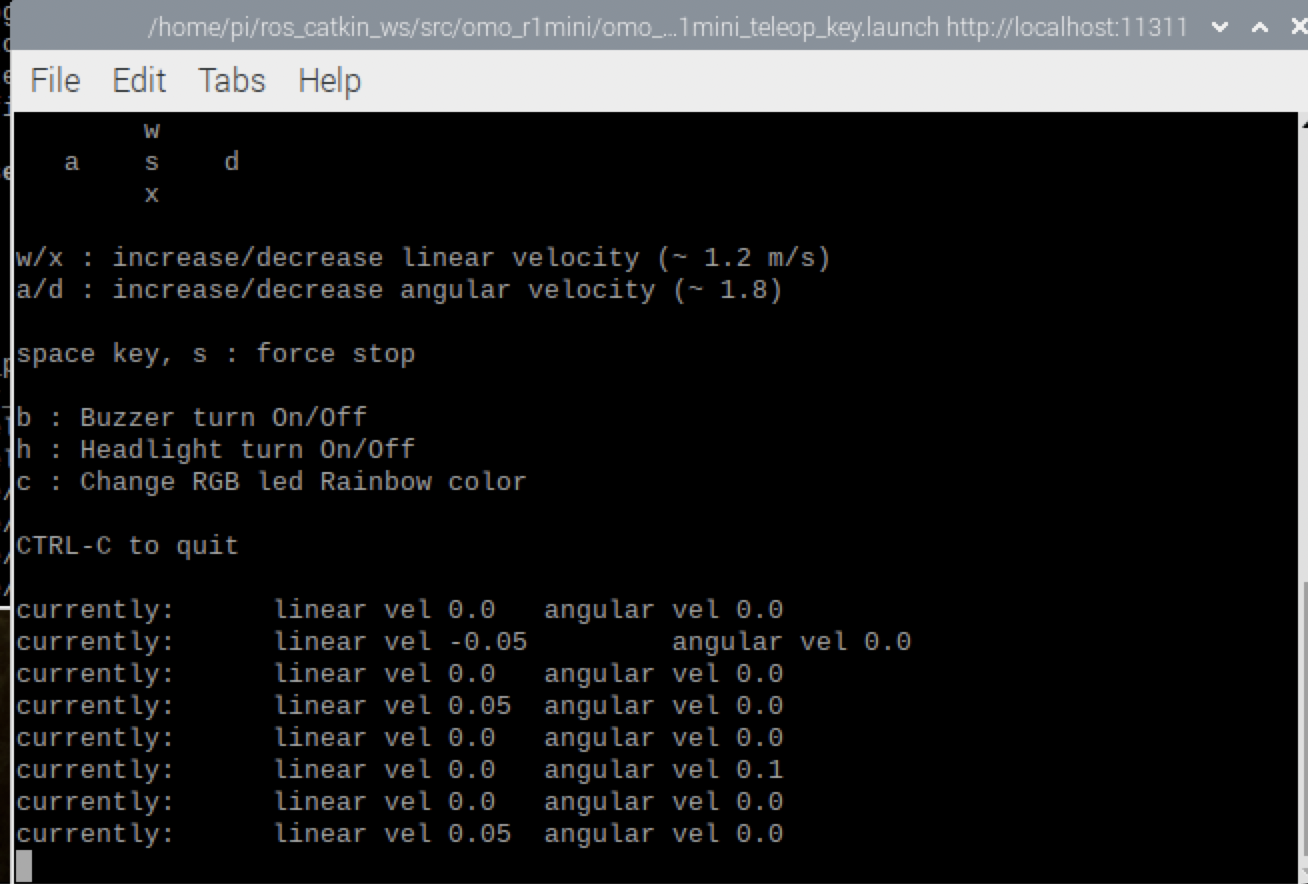
'Project > #1 AI 기반 자율주행 로봇을 이용한 매장 관리' 카테고리의 다른 글
| #22 최종 3차 발표 (0) | 2023.02.23 |
|---|---|
| #21 omorobot_r1mini Rplidar A1m8로 slam (0) | 2022.11.02 |
| #18 raspberry pi에 melodic설치 (omorobot_r1mini 다루기 build up) (0) | 2022.10.30 |
| #17 AI 기반 자율주행 로봇을 이용한 매장 관리 공모전 2차 심사본 (0) | 2022.10.07 |
| #16 raspberrypi ubuntu 20.04 LTS 원격접속 xrdp를 사용해 url 띄우기 (2) | 2022.10.07 |