0. 전기 모터의 분류

1. DC 모터
(1) Brushed DC motor
브러쉬 모터는 브러쉬의 접촉을 통해서 회전에 따라 전기자 전류의 극성이 바뀌게 된다.
따라서 기계적 소음과 전기적 잡음이 심하며 브러쉬의 소모로 내구성이 떨어진다는 단점이 있다.
(2) BLDC motor
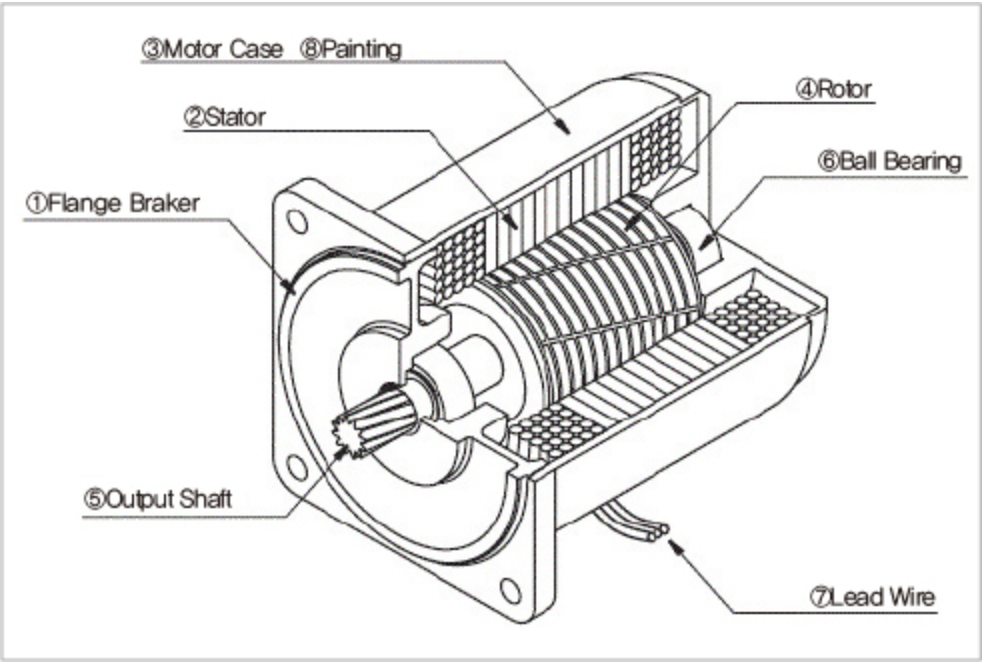
(2)-1. BLDC 모터의 구조 (BRUSHLESS MOTOR)
BLDC 모터는 브러쉬가 없는, 기계적 접촉이 없느 모터이다. stator은 코일, rotor은 영구자석으로 되어 있으며, 홀센서를 이용해 회전자의 극성을 파악하여 고정자 코일을 제어한다.
브러쉬가 없어 수명이 길고 내구성이 좋아 전기 자동차용으로 사용할 수 있는 모터이다.
DC모터의 stator의 영구자석과 rotor의 코일이 바뀐 형태이다.
BLDC 모터 구조는 로터의 위치검출용 자기소자 또는 광학식 엔코더가 모터에 내장되어 있다.
이 위치검출기에서 구동회로로 신호를 보낸다. 모터 권선은 3상 스타(STAR)결선이다.
rotor(회전자)는 영구자석을 사용한다.
검출용 자기소자에는 홀 IC(Hall IC)가 사용된다. stator(고정자) 안쪽에 3개 배치되어 있으며, rotor가 회전될 때마다 홀 IC에서 디지털 신호가 출력된다.
(2)-2. BLDC 모터의 구동방법
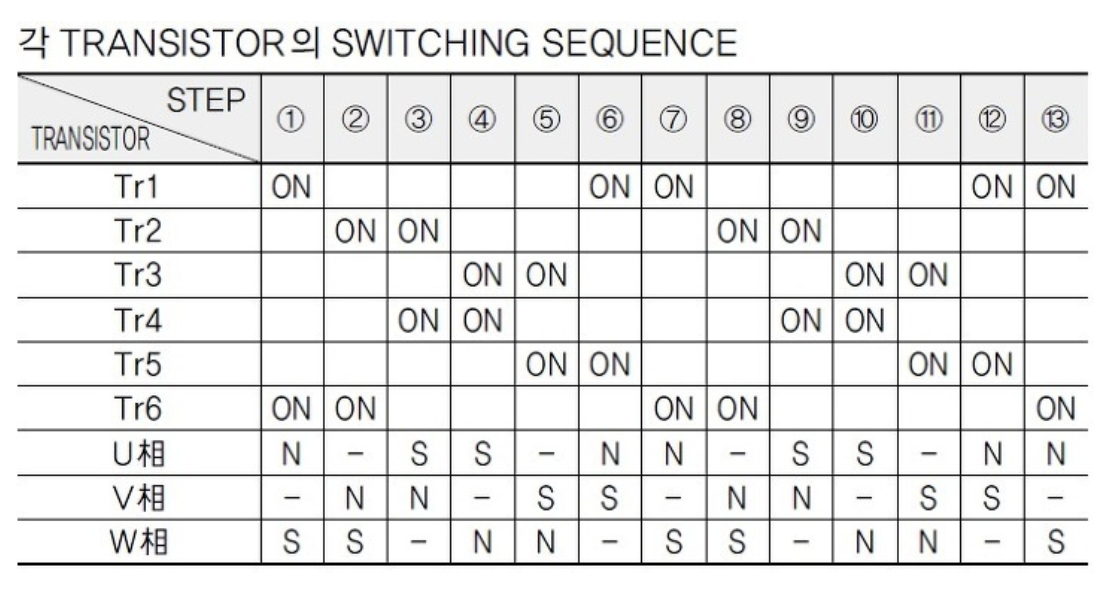
모터 권선에는 스위칭(switching)용 트랜지스터가 접속되어 있으며, 트랜지스터는 6개로 인버터를 구성하고 있다.
상하 트랜지스터가 교대로 ON-OFF를 일정한 순서로 반복하며, 권선 전류의 방향을 바꿔준다.
아래 그림의 트랜지스터 스위칭 시퀀서 (Transistor switching sequence)에서 스텝1️⃣의 경우, 트랜지스터는 Tr1과 Tr6이 ON 상태로 되어 있다. 이 때 권선전류는 U상에서 W상으로 흐르며, U상은 N극으로 W상은 S극으로 여자된다.
이에 따라 로터는 30도 회전한다. 이 동작을 12번 반복하면서 로터는 회전한다.
(2)-3. BLDC 모터의 제어방법
BLDC 모터의 구동회로는 그림과 같은 구성으로 모터와 접속되어 있으며, 크게 5개의 블록으로 구성되어 있다.
- 파워 회로
- 전류제어 회로
- 로직(LOGIC)회로
- 설정 비교 회로
- 전원 회로
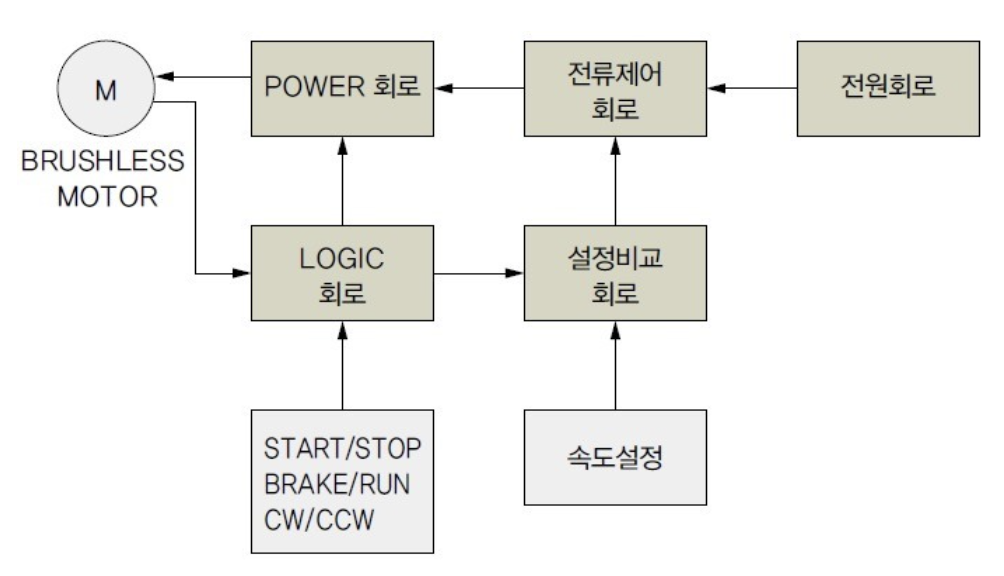
- 파워회로
모터 권선에 흐르는 전류를 제어한다. 트랜지스터를 6개 사용한다.
상하로 접속된 트랜지스터가 일정한 순서로 ON-OFF를 반복하며 모터 권선에 전류를 흐르게 한다. - 전류제어 회로
모터에 흐르는 전류는 부하의 크기에 따라 달라진다.
모터에 흐르는 전류는 상시 검출되어, 설정된 회전속도에서 오차가 발생하지 않도록 제어된다. - 로직회로
모터의 HALL IC로부터 피드백 신호를 받아 로터의 위치를 검출하고, 모터의 여자 순서를 결정한다.
여기에서의 신호는 파워 회로의 각 트랜지스터의 BASE로 접속되어 트랜지스터를 일정한 순서로 구동한다.
모터의 회전속도를 검출하는 역할도 맡고 있다.
모터로의 지령, START/STOP, BRAKE/RUN, CW/CCW 제어도 실행한다. - 설정 비교 회로
속도설정신호와 모터의 회전속도 신호를 비교한다.
이 결과로 모터의 회전속도가 설정보다 높으면 모터로의 입력을 낮추며, 낮으면 모터로의 입력을 올려 설정 회전속도로 되돌린다. - 전원회로
상용전원으로 모터와 각 제어회로를 구동하기 위해 필요한 전압으로 한다.
i-매거진
[전동기 4] BLDC 전동기 제어 직류 전동기는 제어가 간단하여 속도/토크 제어가 요구되는 여러 응용 분야에 널리 사용되어 왔다. 그러 나 직류 전동기는 기계적인 접촉 구조인 정류자 (Commutator)와
magazine.hellot.net
=> BLDC 전동기 제어 더 자세한 내용
(2)-4. BLDC 모터 실제
https://www.youtube.com/watch?v=bCEiOnuODac
2. AC 모터 (유도 전동기)
교류 전류가 고정자 권선에 공급되면 전자기 유도에 의해 자기장이 변화하게 된다.
회전자에서 회전하는 자기장에 의해 유도전류가 생기고 토크에 의해 회전자에 있는 측에서 회전력이 발생한다.
보통 50~60HZ의 교류 전원을 사용하지만 높은 회전속도를 얻고자 할 때에는 수백 Hz에 이르는 높은 주파수의 교류전원을 사용하기도 한다.
소형 전동기의 회전자에는 단락된 권선을 사용하고 대형 교류 모터에는 권선을 감아서 사용한다.
AC 모터는 크게 단상식 / 3상식으로 나뉘며, 회전자의 유형에 따라 유도 전동기, 동기 전동기, 정류자 전동기로 분류된다.
일정한 주파수 전원으로 가동될 경우, 유도 전동기는 대체적으로 정속도를 유지. 동기 전동기는 완전한 정속도 정류자 전동기는 광범위한 영역에서 속도 조절이 가능하다.
교류 전동기의 용량은 수십 와트(w)의 소형에서 수백 키로와트(kw)의 대형에 까지 이르며 선풍기, 세탁기, 냉장고, 펌프, 크레인 등 가정과 산업현장 전반에서 널리 사용되고 있다.
교류 전동기는 구조가 간단하고 브러시나 정류자 같은 소모부가 없으며 고속에서 순간 최대 토크를 출력할 수 있어
응답특성이 빠르고 무게당 토크가 크므로 소형 경량화 할 수 있다는 장점을 지니고 있다.
교류 전동기는 직류 전동기에 비해 상대적으로 저렴하고 효율이 좋으며 수명이 길다는 장점도 가지고 있다.
그러나 직류 전동기(DC모터)에 비해 속도 및 방향 제어 방법이 복잡하다는 단점을 지니고 있다.
[요약] AC 모터는 비동기식과 동기식이 있다. AC 비동기식은 유도 전동기라고도 하며, stator가 만드는 회전 자계에 의해 전기 전도체의 회전자에 유도 전류가 발생하여 미끄러짐에 의한 토크가 발생한다.
유도 전동기는 가격이 저렴하고 단순한 구조라는 장점이 있다.
하지만 효율이 떨어지고, 저속에서 구동 토크가 낮다는 단점이 있다.
<테슬라의 경우 초창기 모델에 고출력 유도 전동기를 구동 모터로 사용하였다.>

https://www.youtube.com/watch?v=AQqyGNOP_3o&list=PLuUdFsbOK_8qVROrfl2M2WSV2xAz-ABVU&index=9
(1) PMSM (Permanent Magnet Synchronous Motor)
AC 동기식 모터는 PMSM이라고 부른다.
rotor가 영구자석으로 되어 있고, stator 코일을 제어하여 모터를 회전시킨다는 점에서 BLDC와 유사하다.
하지만 BLDC는 역기전력이 사다리꼴 형태이고, PMSM은 역기전력이 사인 형태이다.
PMSM이 더 부드럽고 정밀한 제어가 가능하다.
PMSM은 효율이 좋고 저속에서 토크가 좋아 전기차 로터로 가장 많이 사용된다.
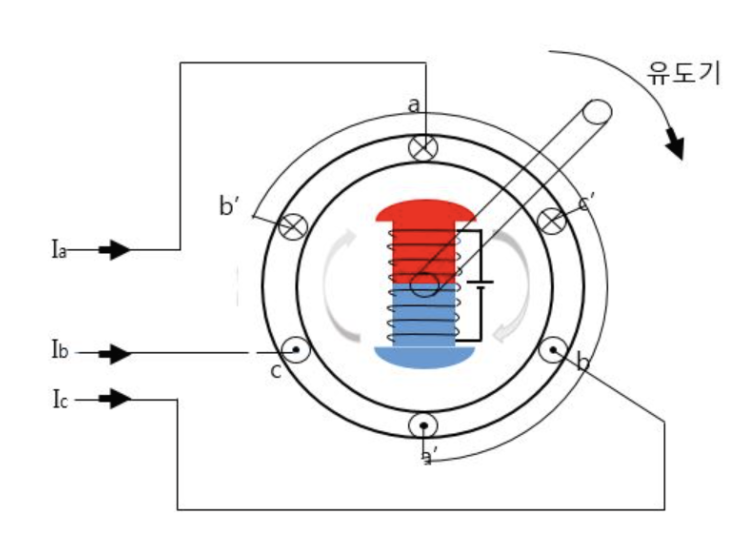
전동기는 그림과 같이 회전하는 부분(회전자)와 고정하는 부분(고정자)로 나눈다.
회전자에서 우리가 생각하는 구동력이 발생하고, 고정자는 이러한 회전력을 얻게 도와주는 부분이다.
그림과 같이 영구자석 동기전동기는 고정자에서 교류 전류(전기자)가 흐르고, 회전자는 영구자석의 형태(계자)로 되어있다.
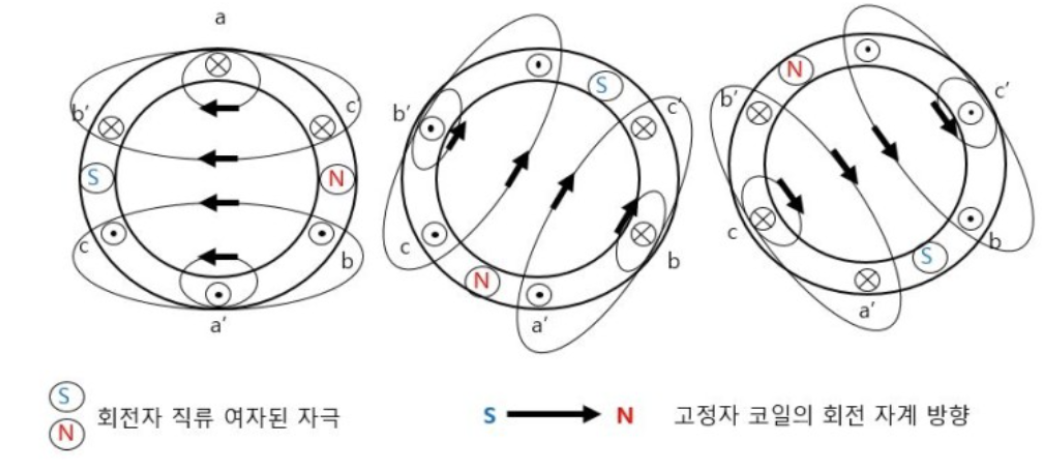
전류가 흐르면 자기장이 생기고, 3상 교류전류가 계속해서 바뀌면 다음 그림과 같이 자기장의 방향 또한 변화하면서 하나의 방향으로 회전한다.
이는 마치 고정자에서 자석 하나가 끊임없이 하나의 방향으로 회전하는 것과 같다.
이를 회전자계가 형성되었다고 말한다.
고정자에서 발생한 회전자계에 의해 회전자의 영구자석 또한, 반응하게 된다.
회전자계와 회전자의 영구자석의 상호작용으로 인하여 회전자가 회전하게 되고, 회전자는 회전자계의 속도와 동일한 속도로 돌아가게 된다.
우리는 이를 동기속도로 돌아간다고 말하며, 이러한 이유로 이러한 전동기를 영구자석 동기전동기라고 부른다.
하지만 영구자석 동기전동기가 고정자의 교류가 생긴다고 해서 바로 돌아가는 것은 아니다.
자석 두 개를 가만히 붙여놨다가 갑자기 하나를 매우 빠르게 돌려주면 나머지 자석이 따라오지 못하고 가만히 있게 된다.
이는 자석이 갖고 있는 관성 때문이다.
이와 마찬가지로 영구자석 동기전동기에서도 고정자의 회전자계가 갑자기 1초에 몇십 바퀴의 속도로 회전한다면 회전자의 영구자석은 그 속도를 따라오지 못한다.
그래서 우리는 영구자석이 이러한 회전 자계를 처음부터 따라올 수 있도록 해야 하는 데, 이러한 방법으로는 자기기동법과 유도전동기법 등이 있다.
(1)-1. PMSM 전동기의 종류
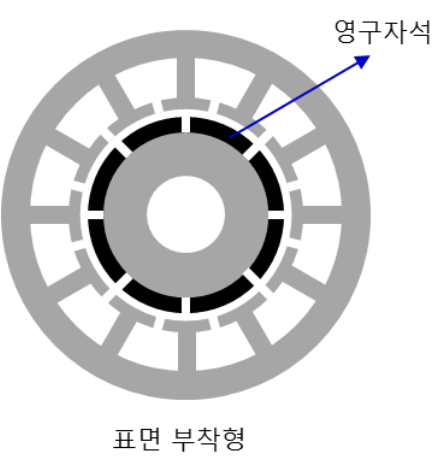
- 표면 부착형(SPMSM : Surface Mounted Permanent Magnet Synchronous Motor)
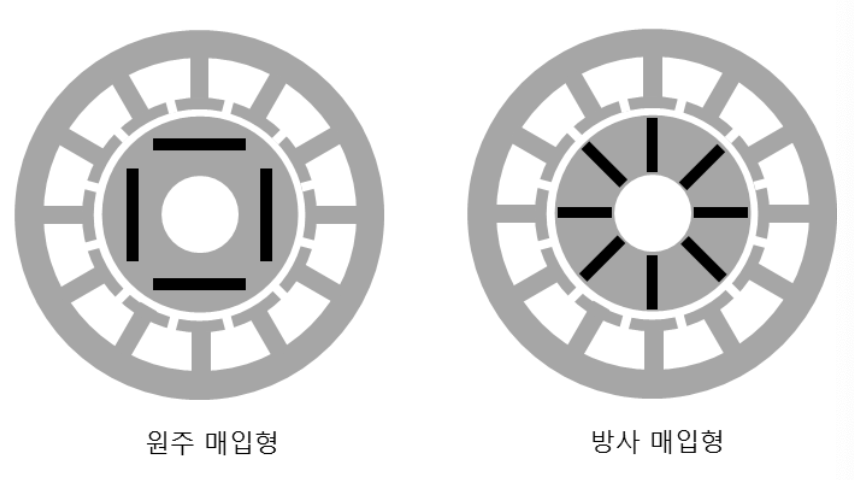
- 매입형(IPMSM : Interior Permanent Magnet Synchronous Motor)
SMPMSM은 설계 시, 원호 형태의 자석이 필요하고 표면에 부착하기 때문에 원심력에 의해 튕겨져 나갈 수 있어 어려움이 많다.
따라서 SPMSM이 더 높아지게 된다.
반면, IPMSM은 자석의 형태가 단순하고 매입해서 부착하기 때문에 내부에 고정되고 공극을 작게 설계할 수 있다.
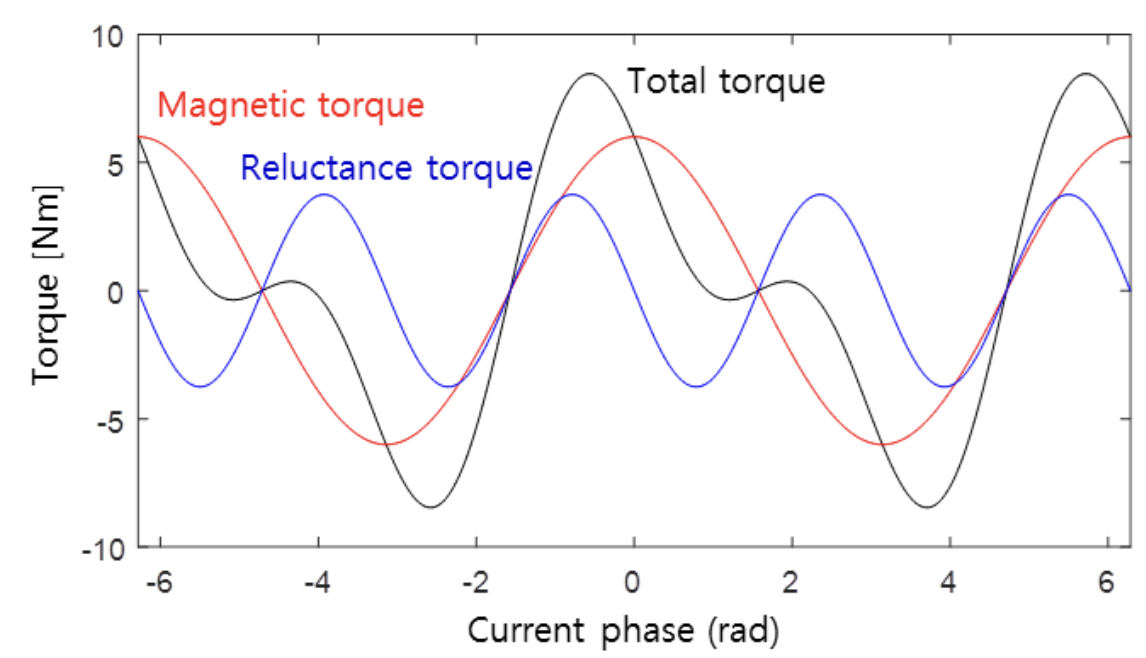
SPMSM은 비교적 간단한 제어 알고리즘으로 토크/속도 제어를 수행할 수 있는 반면 IPMSM은 릴럭턴스 토크를 사용하기 때문에 제어가 복잡하다.
IPMSM은 약자속 제어를 이용하면 표면 부착형에 비해 더 고속에서 운존할 수 있다.
하지만, 릴럭턴스 변화는 고조파로 인한 진동 및 소음 발생을 야기할 수 있다.
(1)-2. Synchronous Motor
https://www.youtube.com/watch?v=Vk2jDXxZIhs
(2) Asynchronous motor
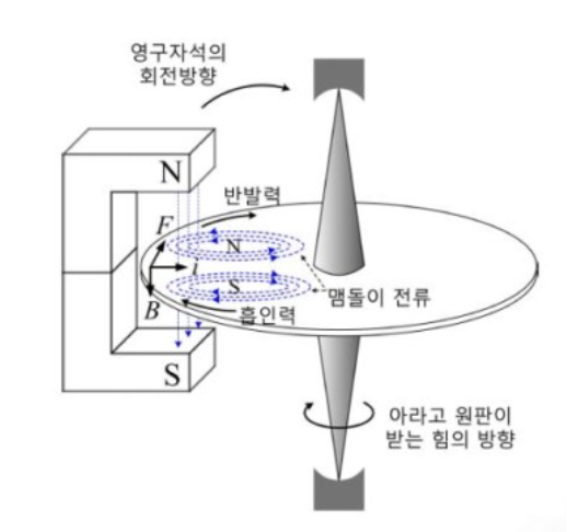
아라고 원판의 원리를 이용하였고 영구 자석의 회전 방향을 따라가는 방향으로 움직인다.
(2)-1. Slip ring Motor
https://www.youtube.com/watch?v=JPn5Ou-N0b0
'Study > Motor Control' 카테고리의 다른 글
| [code analysis] 3상 인버터 보드 M1_inverter.c (0) | 2023.02.13 |
|---|---|
| Motor generator set(M-G set) (0) | 2023.02.13 |
| BLDC 모터와 PMSM 모터의 차이 (0) | 2023.02.13 |
| DC모터와 AC모터의 구동 차이 (0) | 2023.02.12 |
| Encoder(엔코더) (0) | 2022.08.07 |