2023.02.24 - [Project/#3 PI-IP controller] - #3 BLDC(PMSM) [PI-IP controller] Simulation
#3 BLDC(PMSM) [PI-IP controller] Simulation
1. Controller a = 1 : PI controller a = 0 : IP controller a = 0.5 : PI-IP controller 2-(1). [a=1] PI controller 지령속도 도달 [Simulation] [조건] 0~0.5s 동안, 1000rpm 일 때 PI controller [a=1] PI-IP controller [a=0.5] IP controller [a=0] Wrpm[r
jgewjsrhdms.tistory.com
=> 위 실험의 simulation을 사용한 것과 실제 motor를 가지고 실험한 것 비교
1. 초기조건
CCS를 통해 motor를 돌렸다.
PI-IP제어기로 동작되게 code를 변경하였고 a=1을 넣어 PI제어기로 동작하도록 하였다.
초기 set값인 Kps = 0.04, Kis=0.5, Kas=25로 지정되어 있는 상태이다.
da_sel은 1100rpm일 때로 기동.
2. [a=1] PI controller 지령속도 도달 Simulation
[Simulation]

[조건] 0~0.5s 동안, 1000rpm 일 때
| PI controller [a=1] | PI-IP controller [a=0.5] | IP controller [a=0] | |
| Wrpm[rpm] | 1000.7 | 542.4 | 113.3 |
| Iqs[A] | 1.6 | 0.4 | -0.5 |
| Va[V] | 4.0 | 0 | 3.6 |
Unit step function을 0.05s일 때 지령 속도를 주었고 PI제어기에서는 0.05806s일 때 지령속도에 다달았다.
둘의 차는 0.008s이다.
3. [a=1] PI controller 지령속도 도달 Lab
빨강색이 지령속도 노랑색이 실제 모터의 속도를 나타낸다.
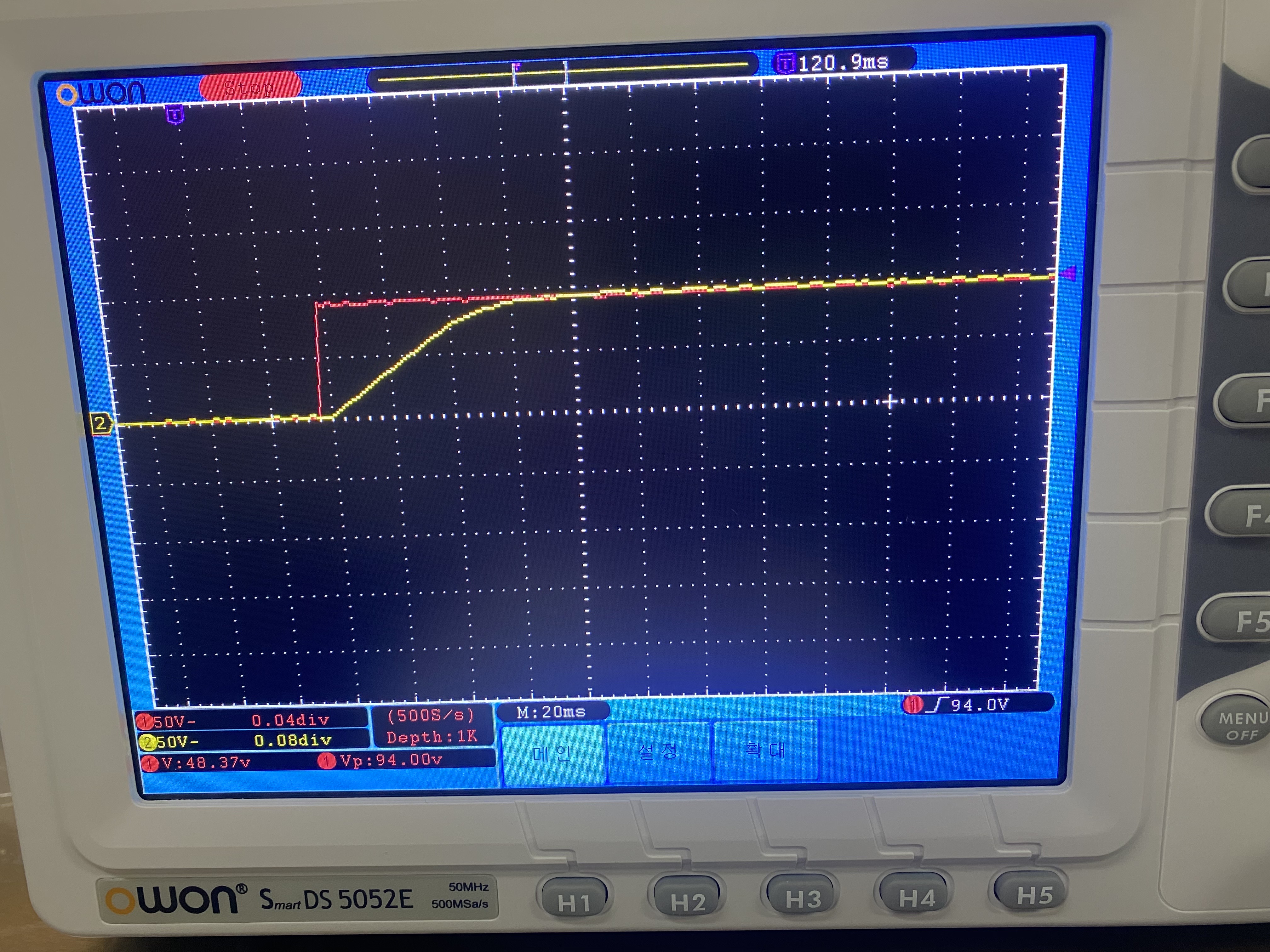
0.0392s의 시간에 속도지령을 주었고 0.1209s일 때 지령속도에 다다른것을 oscilloscope를 통해 확인하였다.
둘의 차는 0.0817s이다.
4. 결과비교
| step(s) | 지령속도도달 | 속도도달에 걸리는 시간 | |
| Simulation | 0.05 | 0.05806 | 0.008 |
| Lab | 0.0392 | 0.1209 | 0.0817 |
실제 모터 파라미터에 차이가 있고 시뮬레이션은 디지털 제어이기 때문에 차이가 있다.
'Project > #2 Hybrid controller(based on PI-IP)' 카테고리의 다른 글
| #11 BLDC(PMSM) [PI-IP controller] Simulation set_5 (0) | 2023.03.16 |
|---|---|
| #10 BLDC(PMSM) [PI-IP controller] Simulation set_4 (0) | 2023.03.16 |
| #9 BLDC(PMSM) [PI-IP controller] Simulation set_3 (0) | 2023.03.15 |
| #8 BLDC(PMSM) [PI-IP controller] Simulation set_2 (0) | 2023.03.14 |
| #7 BLDC(PMSM) [PI-IP controller] Simulation set_1 (0) | 2023.03.14 |