1.스위칭 레귤레이터의 기본
: 출력 피드백 제어 방식
스위칭 레귤레이터의 출력 전압은 기본적으로 안정화되어 있다.
즉, 설정한 전압치를 일정하게 유지하는 기능을 구비하고 있다. 이러한 안정화를 위해, 스위칭 레귤레이터는 출력을 제어 회로에 피드백한다.
제어 회로는 크게 분류하면 전압 모드 제어, 전류 모드 제어, 히스테리시스 제어의 3가지 방식이 있다.
- 전압 모드 제어 (PWM의 예)

전압 모드 제어는 가장 기본적인 방식이다.
피드백 루프를 통해, 출력 전압 만을 피드백 한다.
그리고, 에러 엠프에서 기준전압과 비교한 차분의 전압을 삼각파와 비교함으로써, PWM 신호의 펄스 폭을 결정하여 출력 전압을 제어한다.
- 이 방식의 장점은 전압에만 해당하는 피드백 루프이므로 제어가 비교적 간단하고, ON 시간을 단축시킬 수 있다는 점, 그리고 노이즈, EMI 내성이 높다는 점이다.
- 단점은 위상보상 회로가 복합해진다는 점입니다. 위상보상 회로는 외장이므로, 설계가 번거로워질 가능성이 있다.
- 전류 모드 제어
전류 모드 제어는 전압 모드 제어를 개량한 것이다. 전압 모드의 제어 루프에서 사용하는 삼각파 대신에 회로의 인덕터 전류를 검출해 사용한다.
인덕터 전류 대신에 출력 트랜지스터에 흐르는 전류 및 전류 센스 저항을 삽입하여 전류를 검출할 수도 있다.
- 피드백 루프는 전압 루프와 전류 루프가 있으므로 제어는 비교적 복잡해지지만, 위상보상 회로의 설계가 대폭적으로 간단해진다는 장점이 있다.
또한, 피드백 루프의 안정성이 높다는 점과, 부하 과도 응답이 전압 모드보다 고속이라는 점도 장점이다.
- 단점으로는 전류 검출이 민감하므로, 노이즈가 많으면 PWM 제어에 영향을 미치게 된다.
- 히스테리시스 제어(리플 제어)
히스테리시스 제어 방식은 한층 더 고속의 부하 과도 응답이 필요한 부하, 예를 들어 CPU 및 FPGA 등의 전원 요구에 대응하여 개발된 방식이다.
출력 리플을 검출하여 제어하므로, 리플 제어 방식이라고도 한다.
이 방식은 에러 앰프를 통하지 않고, 콤퍼레이터를 통해 출력전압을 모니터링한다.
설정한 임계치를 초과하거나, 임계치에 미치지 못한 경우를 검출하여, 콤퍼레이터가 직접적으로 스위치의 ON / OFF 제어를 실행한다.
ON 시간을 고정하여 임계치에 미치지 못하는 경우를 검출하는 방식, OFF 시간을 고정하여 임계치를 초과하는 경우를 검출하는 방식, 상하 양쪽의 임계치의 범위를 이용하는 방식이 있다.
- 장점으로는 콤퍼레이터에 의한 직접적인 제어를 통해, 과도 응답이 매우 고속이라는 점과, 위상보상이 필요하지 않다는 점이다.
- 단점으로는 스위칭 주파수가 변동한다는 점과, jitter가 크다는 점, 출력 리플 검출을 위해 ESR (등가 직렬 저항)이 비교적 큰 출력 콘덴서가 필요하다는 점이다.
최근에는 이러한 단점을 개선하여 이 방식을 채용하는 IC가 증가하고 있다.
2.스위칭 레귤레이터의 기본
:PWM(펄스 폭 변조)
:PFM(펄스 주파수 변조)
스위칭 레귤레이터는 명칭 그대로, 입력전압을 스위칭 (ON / OFF)함으로써 원하는 출력전압으로 변환한다.
간단히 표현하자면 입력의 전압을 설정한 출력전압에 적합하도록 나누어 평균화한다.
이러한 입력전압의 평균화에는 주로 2가지 방법이 있다.
- PWM 제어 (펄스 폭 변조)
PWM은 가장 일반적인 전압 제어 방법이다. 일정한 주기에서, 출력이 필요로 하는 만큼의 전력을 스위치 ON하여 입력으로부터 공급받는다. 따라서, 필요한 출력전력에 따라 ON / OFF의 비율, 듀티 사이클 (duty cycle)이 달라진다.
- 주파수가 일정하므로 발생하는 스위칭 노이즈를 예측할 수 있어, 필터링 처리가 용이하다는 장점이 있다.
- 단점으로는 주파수가 일정하므로 중부하 시나 경부하 시에도 스위칭 횟수가 동일하여 자기 소비전류가 변하지 않기 때문에, 경부하 시에는 이러한 스위칭 손실로 인해 효율이 저하된다.
- PFM 제어 (펄스 주파수 변조)
PFM은 고정 ON 시간 타입과 고정 OFF 시간 타입이 있다.
고정 ON 시간 타입을 예로 들면 (그림 참조), ON 시간은 일정하고 OFF 시간이 변한다.
다시 말하자면, 다시 ON되기까지의 시간이 달라지는 것이다.
부하가 커지면, 시간 내의 ON 횟수를 늘려 부하에 대응한다.
즉, 중부하 시에는 주파수가 높아지고, 경부하 시에는 주파수가 낮아진다.
- 장점으로는 경부하 시에는 전력의 추가가 그다지 필요하지 않으므로, 스위칭 주파수가 낮아지고 스위칭 횟수가 줄어 스위칭 손실이 감소하기 때문에, 경부하 시에도 고효율을 유지할 수 있다.
- 단점으로는 주파수가 변하므로 스위칭에 관련된 노이즈가 일정하지 않아 필터링이 어려워집니다. 즉 노이즈 제거가 어려워진다. 또한, 주파수의 경우 20kHz가 되면 가청대역이 되므로, 링잉이 발생하거나 오디오 기기에서는 S/N에 영향을 미칠 가능성이 있다. 이러한 의미에서는 PWM이 더 취급하기 쉽다고 할 수 있다.
3. 모터의 PWM 구동 방식
H 브리지 회로는 DC 모터의 구동 회로 중에서 가장 일반적으로 사용 되고 있는 회로이다.
H 브리지 회로는 단전원에서 DC 모터의 정전/역전이 가능하도록 구상된 것이다.
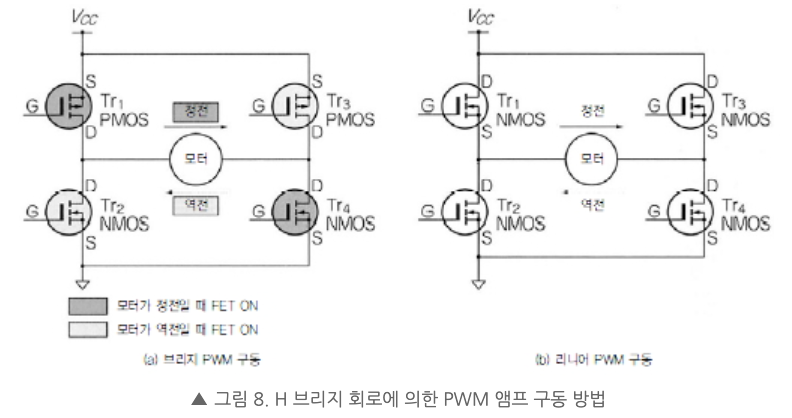
그림(a)에는 P channel MOSFET이 사용되고 있고 그림 (b)에는 N channel MOSFET이 사용 되고 있다. FET의 구동 방법은 완전히 다르며 모터의 제어성도 다르다.
(a)를 브리지 PWM구동이라고 하고 (b)를 리니어 PWM구동이라고 임의로 명명한다.
1. 브리지 PWM 구동의 FET 게이트 드라이브 회로 예
그림은 브리지 PWM 구동 방법의 FET게이트 드라이버 회로 예이다.
FET 드라이브 IC로 MC33033을 사용하였다.
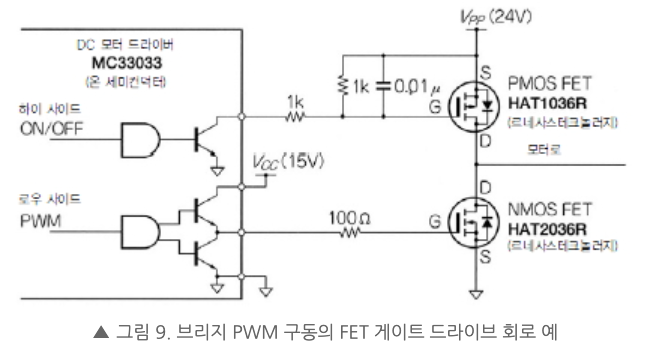
- 플로팅 전원은 필요 없다.
하이 사이드 측의 FET에 P channel MOSFET을 사용하고 있으므로 FET의 소스는 VPP (+{24V)로 되어 게이트 드라이버를 위한 플로팅 전원이 필요 없다.
플로팅 전원이 필요 없다는 것은 게이트 드라이브에 관한 신호의 레벨 변환이 필요 없어 IC의 집적화가 용이하다는 뜻이다. - PWM 구동은 로우 사이드 측 FET뿐
PWM 구동되는 것은 로우 사이드 측 FET뿐이다. 하이 사이드 측 FET은 DC모터인 경우 정전/역전 전환 시 ON/OFF된다. - 관통 전류에는 주의가 필요하다.
로우 사이드 측 FET가 PWM구동하고 있을 때, 하이 사이드 측 FET은 OFF되어 있어야 한다. 그렇지만 로우 사이드 측 FET가 OFF에서 ON으로 전환됐을 때, 하이 사이드 측 FET의 드레인 전압은 고전압(24V에 가까운 전압)에서 0V로 되지만 FET에는 ㄴ드레인-게인 사이에도 용량이 있으므로 게이트 전압이 드레인에 끌려가듯 내려가 버린다. 그렇게 되면 로우 사이드 측 FET와 하이 사이드 측 FET가 함께 ON으로 돼버려 순간적 이긴 하지만 관통전류가 흐르게 된다.
그림에서 하이 사이드 측 FET의 게이트에 접속되어 있는 콘덴서는 그에 대한 대책이다.
2. 브리지 PWM 구동 방법의 특징
브리지 PWM 구동 방법에 의해 DC 모터를 구동 했을 경우의 특징을 기술한다.
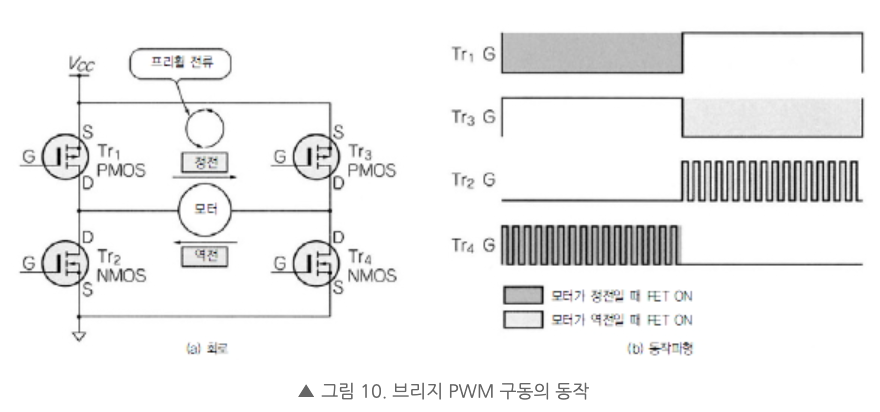
- 정전/역전이 가능
그림(a)은 브리지 PWM 구동 방법에 의한 DC 모터 정전동작 및 역전동작을 설명한다.
정전동작인 경우는 Tr1을 ON하고 Tr4를 PWM으로 구동한다. 이 때 Tr2, Tr3은 모두 OFF이다.
역전동작이 경우는 Tr3을 ON하고 Tr2를 PWM으로 구동한다. 이 때, Tr1, Tr4는 모두 OFF이다.
이와 같이 H브리지 회로의 FET를 전환하면 DC모터의 정전/역전이 가능해진다.
그림(b)는 그 모습을 타임차트로 나타낸 것이다. - 프리휠 전류는 하이 사이드 측의 로컬 전류로 된다.
프리횔 전류는 그림(a)와 같이 하이 사이드 측의 로컬 전류로 된다. Tr3은 OFF되어 있지만 FET의 보디 다이오드가 프리휠다이오드로 된다. - 모터 동작의 4상한 동작 가운데 2상한 동작 및 4상한 동작에는 대응할 수 없다.
브리지 PWM 구동 방법에서는 모터 전류의 방향이 결정 돼 버린다. 정전을 CW 방향 회전이라고 하면 CW 방향의 토크밖에 발생시킬 수 없으므로 2상한 동작에는 대응할 수 없다. 마찬가지로 4상한 동작도 대응할 수 없다.
2상한 4상한 동작 모두 제동 동작이며 회전방향과 토크의 발생방향과는 반대의 관계로 되어있다.
구동 전류와 프리휠 전류는 모터의 전류 방향이 같다. 가령 PWM의 ON 듀티를 제로로 해도 모터에 제동 전류를 흘릴 수 없다.
PWM의 ON듀티를 제로로 하면 구동 전류가 없어지므로 모터는 마찰력에 의해 회전수가 떨어진다. 그러나 이 상태는 모터를 제어하고 있는 것이 아니다.
모터에 제동 전류를 흘리기 위해서는 정전에서 역전으로 FET 스위치시켜야 한다. 그 경우, 모터의 제어성을 현저히 손상시킬 수 있다.
그림 11은 그 모습을 나타낸 것이다.
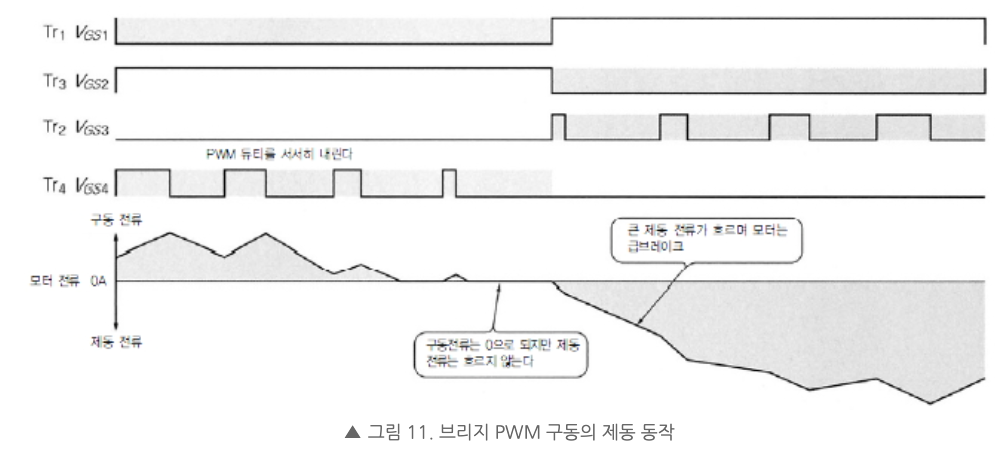
- 모터가 CW(정전)로 고속회전하고 있다고 하자. 이 상태에서 모터를 정지시키려면 먼저 PWM의 ON듀티를 서서히 내린다.
모터의 구동 전류가 적어지므로 회전수가 떨어지지만 제동 전류를 흘리고 있는 것은 아니므로 마찰이 적은 메커니즘에서는 기대했던 정도로 떨어지지 않는다.
다음에 FET의 동작상태를 CW(정전)에서 CCW(역전)로 스위치한다.
모터는 고회전이므로 큰 유도기전력이 발생한다.따라서 이번에는 다이오드 1개분으로 모터를 단락시킨 것이 되므로 큰 제동 전류가 하이 사이드 측의 루프 전류로서 흘러버린다.
브리지 PWM 구동 방법에서는 하이 사이드 측의 FET의 PWM 제어되고 있지 않으므로 이 제동 전류는 제어되지 않고 큰 전류로 돼 버린다. 그러면 모터에는 급 브레이크가 걸려버려 모터의 제어성을 현저하게 손상시킨다. - 위치 제어용 구동 방법이 아니다.
브리지 PWM 구동 방법은 위치제어용 구동 방법이 아니다
위치제어에 요구되는 성능은 위치 정밀도 뿐만 아니라 모터의 가속성능이나 감속성능도 중요한 요소이다. 브리지 PWM 구동 방법에서는 제동동작에 능숙하게 대응할 수 없으므로 감속성능에 문제가 있다. 브리지 PWM 구동 방법의 용도로는 감속성능이 별로 문제 되지 않는, 정회전(속도)성능 추구를 주 목적으로 하는 서보 모터나 스테핑 모터가 있다.
여기서 오해하지 말아야 할 것은, 위치제어에 적합하지 않다고 해서 위치제어가 불가능한 것은 아니다. 또 제어동작에 있어서도 제동동작 전용 회로를 따로 설치하면 제동동적을 원활하게 실행할 수 있다.
저항이나 콘덴서를 이용한 회생 브레이크라는 방법이 있다.
3. 리니어 PWM 구동의 FET 게이트 드라이브 회로 예
그림에 리니어 PWM 구동 방법의 FET 게이트 드라이브 회로 예를 나타낸다.
이 회로 예에서는 FET 드라이브 IC로 인터네셔널 렉티파이어(IR)사의 IR2106S를 사용한다.
모터 구동 트랜지스터로서 N채널 MOSFET을 사용하고 있지만 NPN 트랜지스터나 IGBT를 사용하는 경우도 있다.
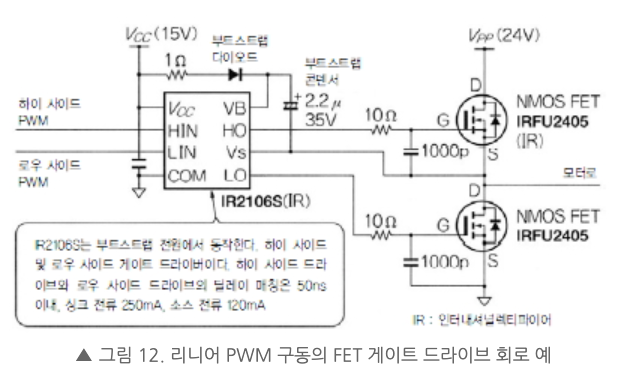
- 플로팅 전원이 필요하다.
하이 사이드 측의 FET에 NMOS를 사용하고 있으므로 그 게이트 전압에는 Vpp(+ 2V)를 초과하는 전압이 필요하고, 또 하이사이드 측 FET의 소스 전위는 0V에서 Vpp(+24V)까지 변동한다. 따라서 게이트 드라이버에 요구되는 전원은 플로팅 전원이어야 한다. - FET 게이트 드라이버 IR2106S의 특징
이 IC의 특징은 소비 전류가 적어 특별한 플로팅 전원을 필요로 하지 않고 다이오드와 콘덴서로 구성되는 부트스트랩 전원에서 동작하므로 회로 규모를 대폭 삭감할 수 있다.
또 인터페이서에도 특별한 연구가 시행되고 있어 마이컴의 3.3V 전원계와 부트스트랩에 의한 플로팅 전원계가 포토커플러를 사용하지 않고 접속할 수 있도록 되어 있다. 이것도 회로 규모를 삭감할 수 있는 큰 요소이다. - 부트스트랩 전원이란
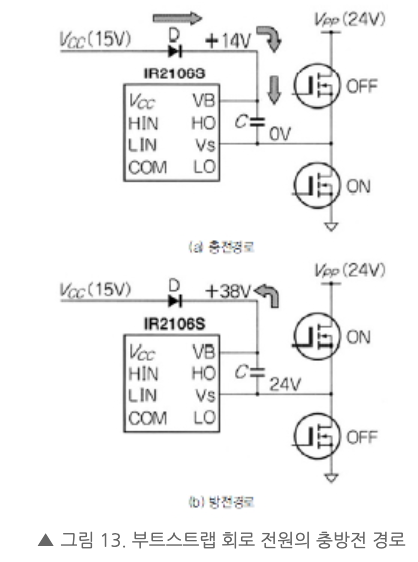
- 그림(a)는 부트스트랩 전원의 충전경로이다. 로우 사이드 측 FET가 ON인 기간동안 부트스트랩 콘덴서에 다이오드를 통하여 charge된다. 다이오드의 전압강하는 1V로 하면 콘덴서에 차지되는 저압은 약 14V로 된다.
그림(b)는 부트스트랩 전원의 방전경로이다. 하이 사이드 측의 FET가 ON인 기간동안 부트스트랩 콘덴서에 discharge된다. 이 때, IR2106S의 Vs 단자는 약 24V로 되어 있으므로 콘덴서에 차지되어 있는 14V를 더하면 IR2106S VB 단자는 약 38V로 된다.
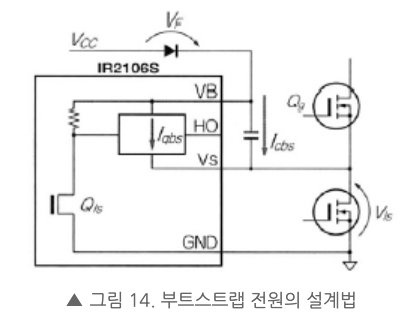
이것이 하이 사이드 측 FET의 게이트 드라이버회로 전원으로 된다. - 부트스트랩 전원의 설계법
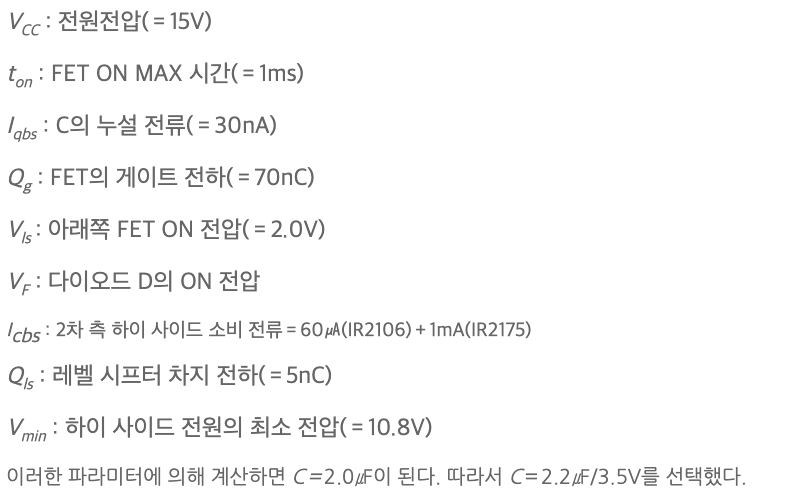
콘덴서와 다이오드에도 나름대로 설계지침이 있는데, IR사의 애플리케이션 노트에 의하면 기본적으로 PWM주파수, 2차측 하이 사이드 소비 전류, 2차측 하이 사이드 전원의 허용 리플량에 의해 결정된다.
그림 14의 부트스트랩 전원 설계법을 보면 다음과 같다.

- 하이 사이드 측 FET, 로우 사이드 측 FET 모두 PWM구동한다.
리니어 PWM 구동에서는 하이 사이드 측 FET와 로우 사이드 측 FET 양쪽 모두 PWM 제어된다. 이 점이 브리지 PWM 구동과 결정적으로 다른 부분이며 모터의 제어에 있어 우위성이 있다.
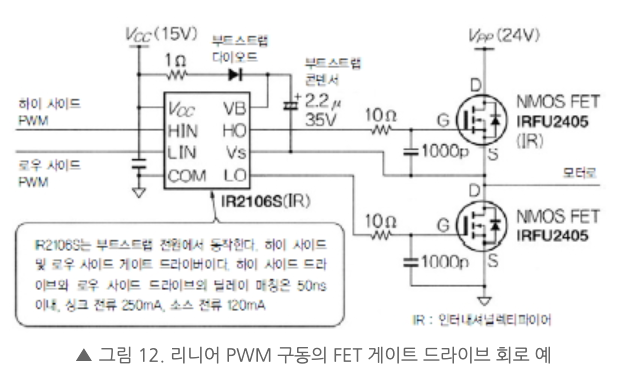
- 그림12의 하이 사이드 측 FET와 로우 사이드 측 FET가 동시에 ON되면 Vpp + 24V에서 GND로 관통 전류가 흘러 FET를 파손시켜버린다.
그러한 FET를 ON/OFF 하는 게이트 신호에는, 동시에 High로 되지 않는 시간(데드 타임)을 설정해야 한다. 또 리니어 PWM 구동에서는 하이 사이드 측 FET와 로우 사이드 측 FET의 스위칭 특성이 갖춰져 있는 것이 바람직하므로 같은 FET가 사용되는 경우가 일반적이다.
4.리니어 PWM 구동 방법의 특징
리니어 PWM 구동 방법에 의해 DC 모터를 구동했을 경우의 특징을 기술한다.
이 항의 설명에서 이해하기 쉽게 DC 모터를 예로 들지만, AC 모터에 있어서도 그 특징은 같다.
- 정전/역전 가능
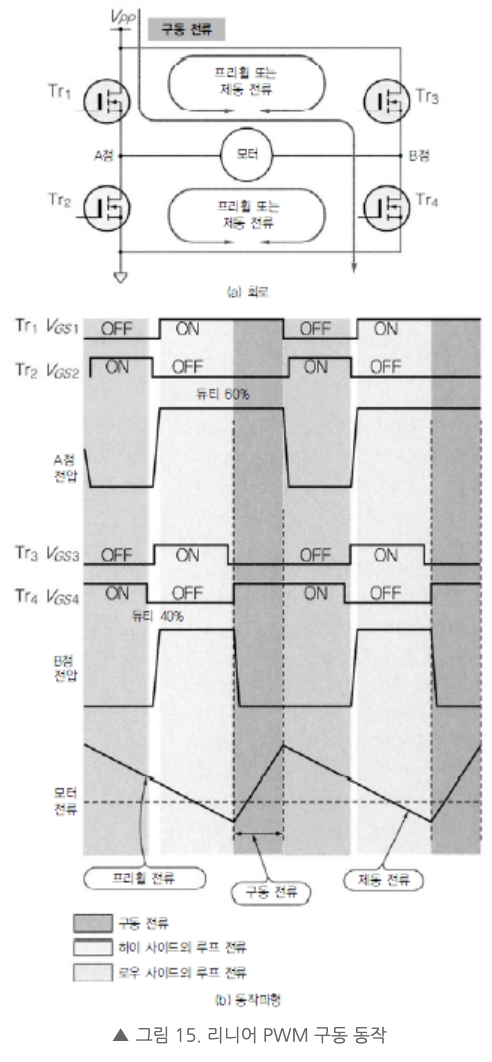
그림(a)은 리니어 PWM 구동 방법에 의한, DC 모터 정전 동작 및 역전동작을 설명한 것이다. 또 그림(b)는 그 모습을 타임차트로 나타낸 것이다.
A점의 전압은 ON 듀티가 60%로 되어 있다. B점의 전압은 듀티가 40%로 되어있다.
모터에 구동 전류가 흐르는 것은 A점 전압과 B점 전압에 차이가 있는 시간 뿐이다. 그 시간을 길게 하면 구동 전류가 증가하고, 반대로 그 시간을 짧게 하면 구동 전류가 감소된다.
또 A점과 B점의 전압을 ON 듀티 50%로 하면 A점, B점은 같은 전압이므로 구동 전류는 흐르지 않는다. 반대로 A점, B점의 전압 ON 듀티를 역전하면 모터의 구동 전류 방향이 전환된다는 것을 이해할 수 있다.
즉 A점 측의 PWM ON 듀티와 B점 측의 ON 듀티를 제어하면 모터 전류의 크기 및 방향을 제어할 수 있으므로 모터의 정전 및 역전이 가능해진다.
- 프리휠 전류는 하이 사이드 측 및 로우 사이드 측의 로컬 전류가 된다.
리니어 PWM 구동 방법에서는 하이 사이드 측의 FET(Tr1, Tr3)와 로우 사이드 측의 FET(Tr2, Tr4)가 엇갈려 ON되고 있으므로 로컬 전류 루프가 형성되어 있다.
때문에 모터 전류의 경로가 끊어지는게(데드타임 제외) 경우는 없다.
즉, PWM 구동에서는 일반적으로 PWM이 OFF하고 있는 동안 전류경로가 단절되는 것처럼 생각되기 쉽지만 리니어 PWM 구동인 경우에는 항상 하이 사이드 측(그림에서 가장 진한 부분) 혹은 로우 사이드 측(그림에서 진하지 않은 부분)의 루프가 닫혀 있으므로 프리휠 전류, 제동 전류에서 모두 양방향으로 모터 전류가 흐르는 상태를 만들고 있다.
=> 이 점이 브리지 PWM 구동 방법과의 결정적인 차이이며 때문에 모터의 제어성에 영향을 미친다. - 모터 동작의 4상한 동작에 모두 대응할 수 있다.
리니어 PWM 구동 방법에서는 브리지 PWM 구동 방법과 같이 H 브리지의 FET를 스위치 하는 개념이 없다.
PWM 설정과 모터 유도기전력의 관계에 따라 모터의 구동 전류에서나 제동 전류에서도 임의로 제어할 수 있다. 따라서 모터 동작의 4상한 동작에 전부 대응할 수 있다.
그림은 리니어 PWM 구동에 의한 모터의 제동동작을 설명한 것이다.
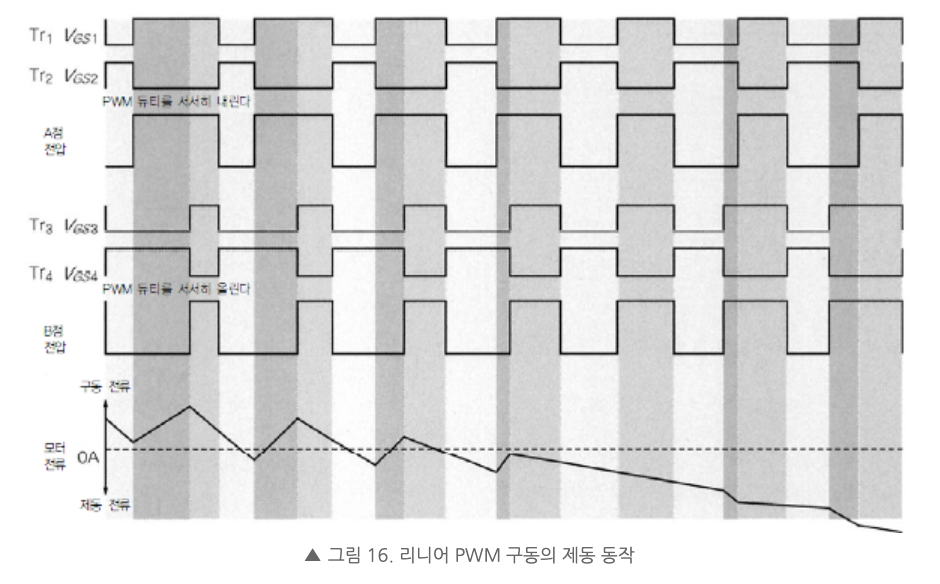
모터는 고속 회전하고 있다. A점 전압의 PWM ON 듀티를 서서히 내리고, B점 전압의 PWM ON 듀티를 서서히 오리면 모터의 구동 전류가 적어지고 반대로 제동 전류가 증가한다.
제동 전류의 비율이 구동 전류보다 많아지면 모터에는 브레이크가 걸린다.
리니어 PWM 구동 방법에서는 이와 같이 구동 전류와 제동 전류의 배분을 조정함으로써 1상한 동작, 3상한 동작은 물론 회전방향과 토크의 발생방향과는 반대 관계에 있는 2상한, 4상한 동작에도 대응할 수 있다.
- 위치, 속도, 토크 제어, 모든 제어 방식에 적용할 수 있다.
모터 제어 방식으로는 위치, 속도 및 토크 제어가 있는데, 리니어 PWM 구동 방법은 모든 제어 방식에 적응할 수 있다.
'Study > Power electronics' 카테고리의 다른 글
| Inverter Board analysis (0) | 2023.02.13 |
|---|---|
| Schmitt-Trigger 인코더 (0) | 2022.08.07 |
| 평활회로(AC->DC) (0) | 2022.08.02 |
| Capacitor(캐패시터), Inductor(인덕터) (0) | 2022.08.02 |
| 회로이론(Electric Circuits) Ch.5 연산증폭기 (0) | 2022.07.08 |